Chien Jong-Chih, Chen Yong-Sheng, Lee Jiann-Der
Degree Program of Digital Space and Product Design, Kainan University, Taoyuan City 338, Taiwan.
Department of Electrical Engineering, Chang-Gung University, Taoyuan City 333, Taiwan.
Sensors (Basel). 2017 Sep 24;17(10):2199. doi: 10.3390/s17102199.
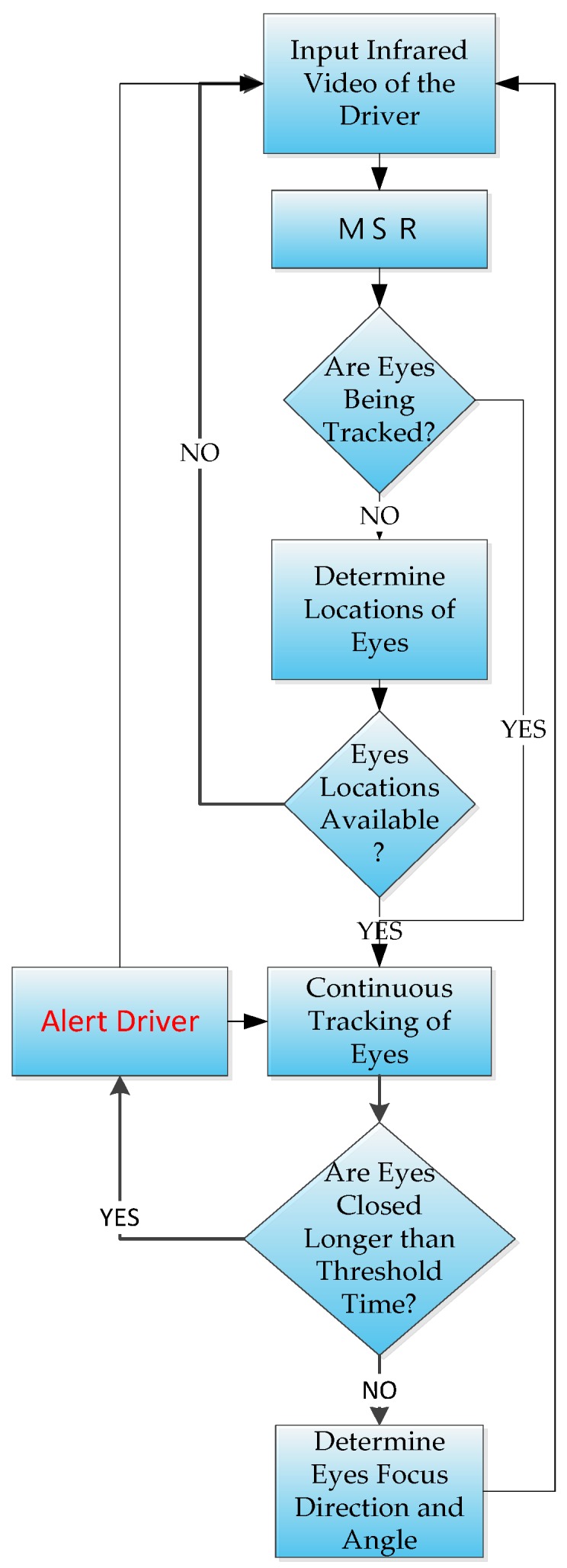
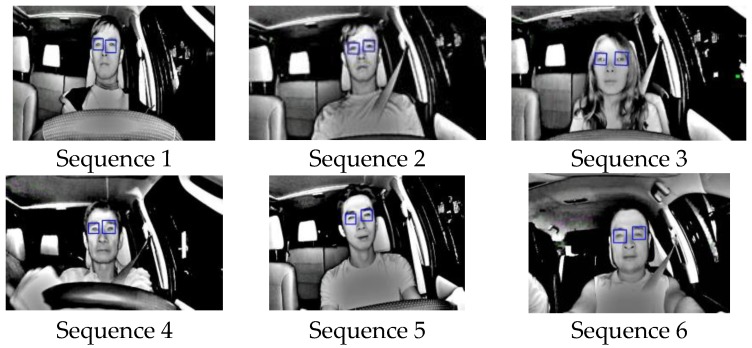
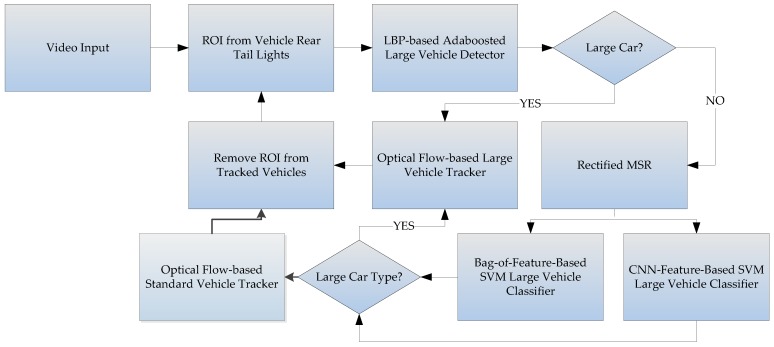
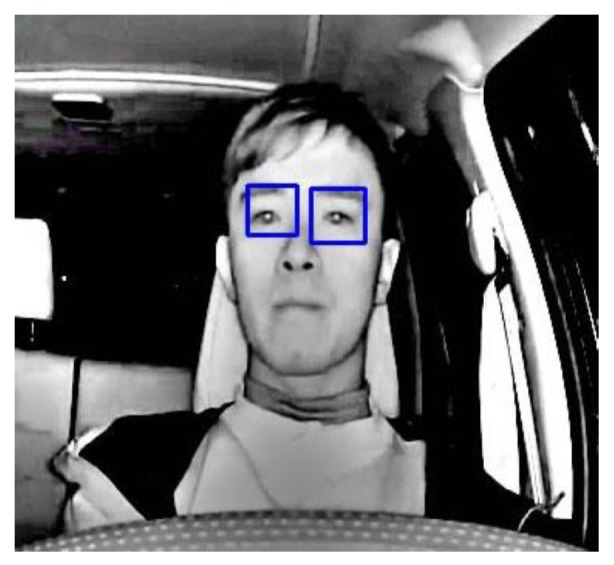
The risks involved in nighttime driving include drowsy drivers and dangerous vehicles. Prominent among the more dangerous vehicles around at night are the larger vehicles which are usually moving faster at night on a highway. In addition, the risk level of driving around larger vehicles rises significantly when the driver's attention becomes distracted, even for a short period of time. For the purpose of alerting the driver and elevating his or her safety, in this paper we propose two components for any modern vision-based Advanced Drivers Assistance System (ADAS). These two components work separately for the single purpose of alerting the driver in dangerous situations. The purpose of the first component is to ascertain that the driver would be in a sufficiently wakeful state to receive and process warnings; this is the driver drowsiness detection component. The driver drowsiness detection component uses infrared images of the driver to analyze his eyes' movements using a MSR plus a simple heuristic. This component issues alerts to the driver when the driver's eyes show distraction and are closed for a longer than usual duration. Experimental results show that this component can detect closed eyes with an accuracy of 94.26% on average, which is comparable to previous results using more sophisticated methods. The purpose of the second component is to alert the driver when the driver's vehicle is moving around larger vehicles at dusk or night time. The large vehicle detection component accepts images from a regular video driving recorder as input. A bi-level system of classifiers, which included a novel MSR-enhanced KAZE-base Bag-of-Features classifier, is proposed to avoid false negatives. In both components, we propose an improved version of the Multi-Scale Retinex (MSR) algorithm to augment the contrast of the input. Several experiments were performed to test the effects of the MSR and each classifier, and the results are presented in experimental results section of this paper.
夜间驾驶所涉及的风险包括困倦的驾驶员和危险车辆。夜间较为危险的车辆中,突出的是大型车辆,它们通常在夜间高速公路上行驶得更快。此外,当驾驶员的注意力分散时,即使是短时间,在大型车辆周围驾驶的风险水平也会显著上升。为了提醒驾驶员并提高其安全性,在本文中,我们为任何现代基于视觉的高级驾驶辅助系统(ADAS)提出了两个组件。这两个组件分别工作,唯一目的是在危险情况下提醒驾驶员。第一个组件的目的是确定驾驶员处于足够清醒的状态以接收和处理警告;这就是驾驶员困倦检测组件。驾驶员困倦检测组件使用驾驶员的红外图像,通过一种MSR加上简单启发式方法来分析其眼睛的运动。当驾驶员的眼睛显示出注意力分散且闭眼时间长于平常时,该组件会向驾驶员发出警报。实验结果表明,该组件平均能以94.26%的准确率检测到闭眼情况,这与使用更复杂方法的先前结果相当。第二个组件的目的是在驾驶员的车辆在黄昏或夜间靠近大型车辆行驶时提醒驾驶员。大型车辆检测组件接受来自常规视频行车记录仪的图像作为输入。提出了一种双层分类器系统,其中包括一个新颖的基于MSR增强的KAZE特征袋分类器,以避免误报。在这两个组件中,我们都提出了多尺度视网膜算法(MSR)的改进版本,以增强输入的对比度。进行了几次实验来测试MSR和每个分类器的效果,结果在本文的实验结果部分给出。