Institute of Biomedical Technology and Technical Medicine, Department of Biomechanical Engineering, University of Twente, Enschede, The Netherlands.
Pain Medicine, Department of Anaesthesiology, University Medical Center Göttingen, Georg-August University, Göttingen, Germany.
Sci Rep. 2017 Oct 18;7(1):13465. doi: 10.1038/s41598-017-13766-6.
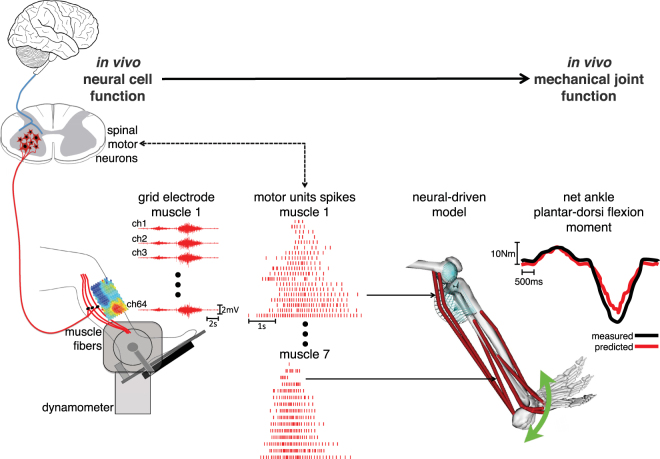
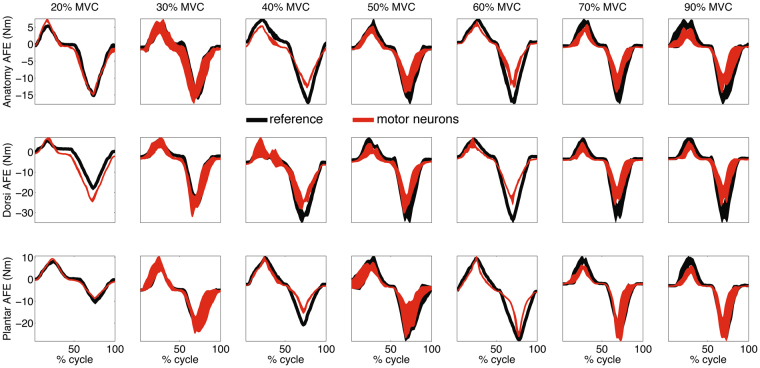
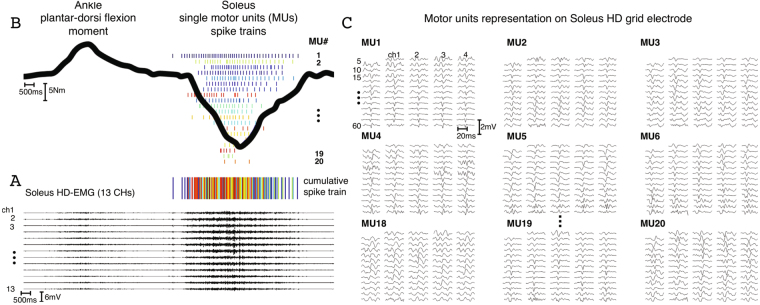
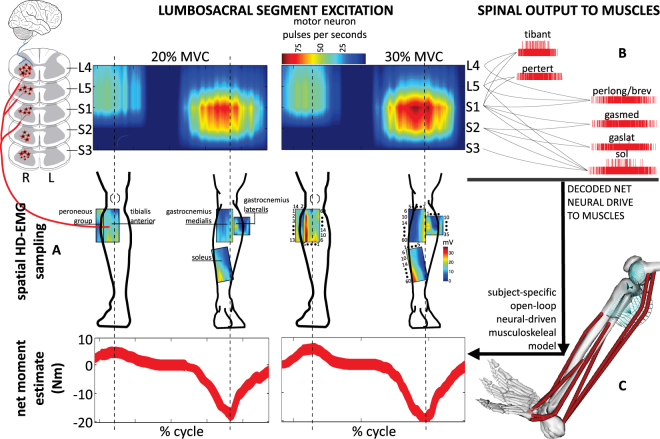
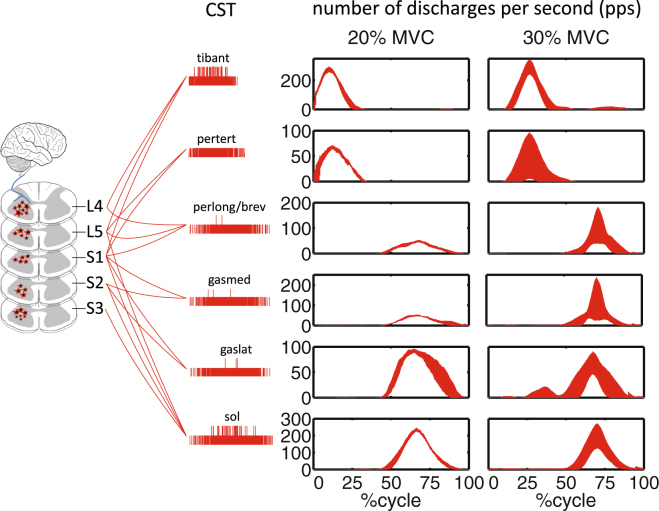
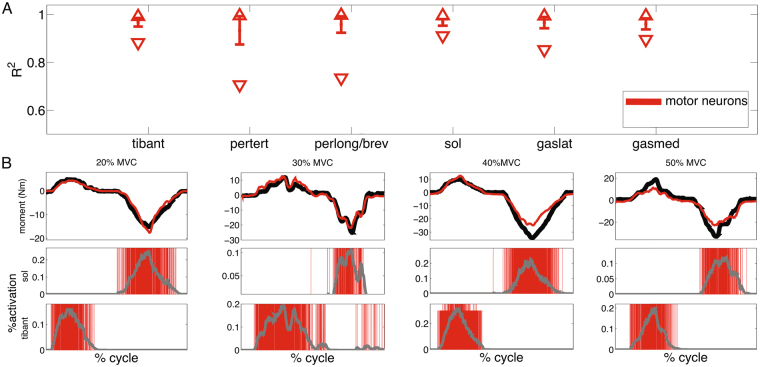
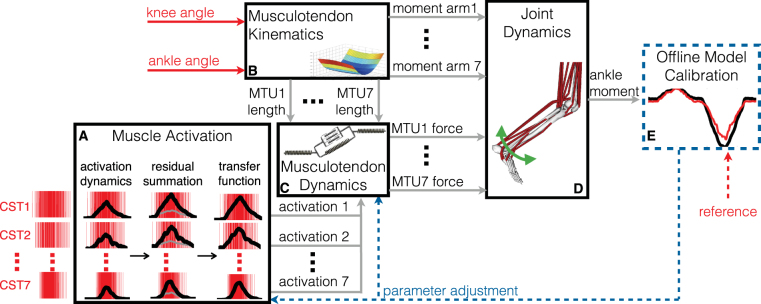
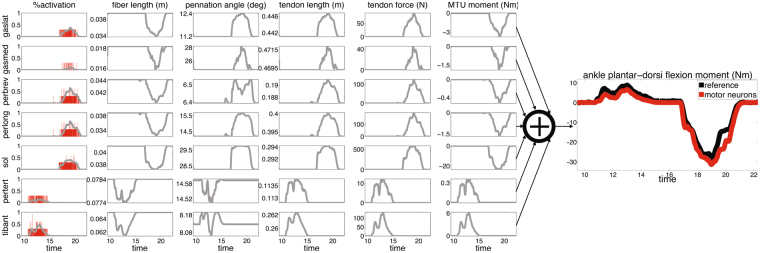
Human motor function emerges from the interaction between the neuromuscular and the musculoskeletal systems. Despite the knowledge of the mechanisms underlying neural and mechanical functions, there is no relevant understanding of the neuro-mechanical interplay in the neuro-musculo-skeletal system. This currently represents the major challenge to the understanding of human movement. We address this challenge by proposing a paradigm for investigating spinal motor neuron contribution to skeletal joint mechanical function in the intact human in vivo. We employ multi-muscle spatial sampling and deconvolution of high-density fiber electrical activity to decode accurate α-motor neuron discharges across five lumbosacral segments in the human spinal cord. We use complete α-motor neuron discharge series to drive forward subject-specific models of the musculoskeletal system in open-loop with no corrective feedback. We perform validation tests where mechanical moments are estimated with no knowledge of reference data over unseen conditions. This enables accurate blinded estimation of ankle function purely from motor neuron information. Remarkably, this enables observing causal associations between spinal motor neuron activity and joint moment control. We provide a new class of neural data-driven musculoskeletal modeling formulations for bridging between movement neural and mechanical levels in vivo with implications for understanding motor physiology, pathology, and recovery.
人类运动功能源于神经肌肉和骨骼肌肉系统的相互作用。尽管人们已经了解了神经和机械功能的机制,但对于神经肌肉骨骼系统中的神经机械相互作用仍缺乏相关理解。这是目前理解人类运动的主要挑战。我们通过提出一种范式来解决这个挑战,该范式旨在研究完整人体中脊髓运动神经元对骨骼关节机械功能的贡献。我们采用多肌肉空间采样和高密度纤维电活动的反卷积技术,解码人类脊髓五个腰骶段的精确α运动神经元放电。我们使用完整的α运动神经元放电序列驱动肌肉骨骼系统的特定于主体的模型进行开环驱动,没有校正反馈。我们进行验证测试,在没有参考数据的情况下,根据看不见的条件估计机械力矩。这使得仅从运动神经元信息就可以准确地对踝关节功能进行盲估。值得注意的是,这使得观察到脊髓运动神经元活动与关节力矩控制之间的因果关系成为可能。我们提供了一类新的神经数据驱动的肌肉骨骼建模公式,用于在体内将运动神经和机械水平联系起来,这对于理解运动生理学、病理学和康复具有重要意义。