Orthopaedic Surgery and Plastic Surgery - Research Department of Neurorehabilitation Systems, Clinic for Trauma Surgery, University Medical Center Göttingen, Göttingen, 37075, Germany.
Department of Biomechanical Engineering, TechMed Centre, University of Twente, Enschede, Netherlands.
Sci Rep. 2020 Apr 2;10(1):5834. doi: 10.1038/s41598-020-62773-7.
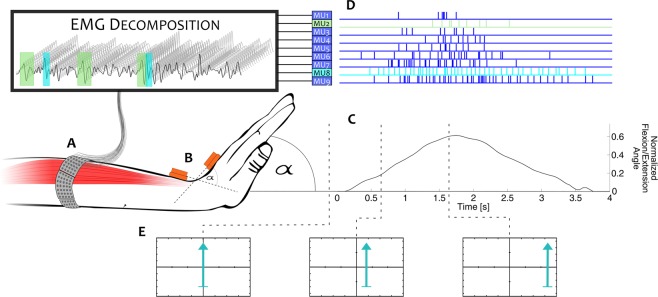
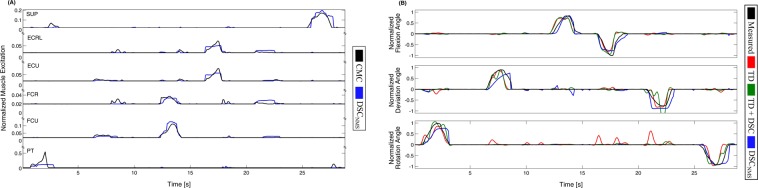
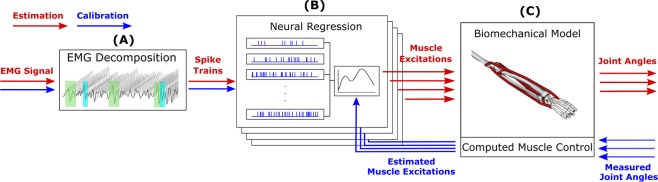
We propose a myoelectric control method based on neural data regression and musculoskeletal modeling. This paradigm uses the timings of motor neuron discharges decoded by high-density surface electromyogram (HD-EMG) decomposition to estimate muscle excitations. The muscle excitations are then mapped into the kinematics of the wrist joint using forward dynamics. The offline tracking performance of the proposed method was superior to that of state-of-the-art myoelectric regression methods based on artificial neural networks in two amputees and in four out of six intact-bodied subjects. In addition to joint kinematics, the proposed data-driven model-based approach also estimated several biomechanical variables in a full feed-forward manner that could potentially be useful in supporting the rehabilitation and training process. These results indicate that using a full forward dynamics musculoskeletal model directly driven by motor neuron activity is a promising approach in rehabilitation and prosthetics to model the series of transformations from muscle excitation to resulting joint function.
我们提出了一种基于神经数据回归和肌肉骨骼建模的肌电控制方法。该范例使用高密度表面肌电图 (HD-EMG) 分解解码的运动神经元放电时序来估计肌肉激发。然后,使用正向动力学将肌肉激发映射到手腕关节的运动学中。在两名截肢者和六名完整身体受试者中的四名中,所提出的方法的离线跟踪性能优于基于人工神经网络的最先进肌电回归方法。除了关节运动学之外,所提出的基于数据的模型驱动方法还以全前馈方式估计了几个生物力学变量,这些变量可能有助于支持康复和训练过程。这些结果表明,使用直接由运动神经元活动驱动的完整正向动力学肌肉骨骼模型是康复和假肢领域中从肌肉激发到关节功能的一系列转换建模的一种很有前途的方法。