Department of Electronics and Telecommunications, Politecnico di Torino, Corso Duca degli Abruzzi 24, 10129 Torino, Italy.
Department of Mechanical and Aerospace Engineering, Politecnico di Torino, Italy, Corso Duca degli Abruzzi 24, 10129 Torino, Italy.
Sensors (Basel). 2017 Oct 21;17(10):2406. doi: 10.3390/s17102406.
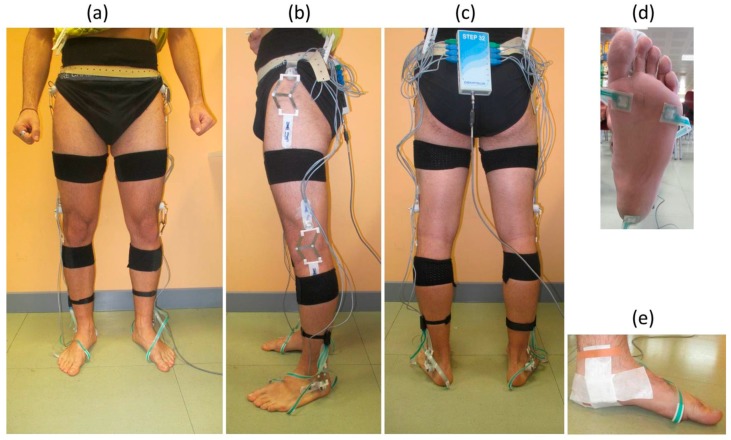
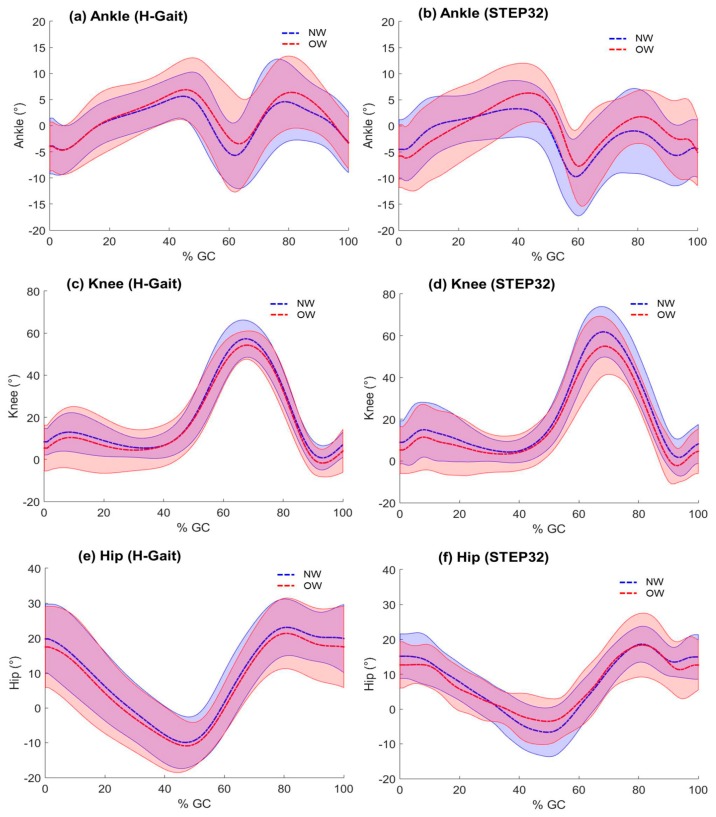
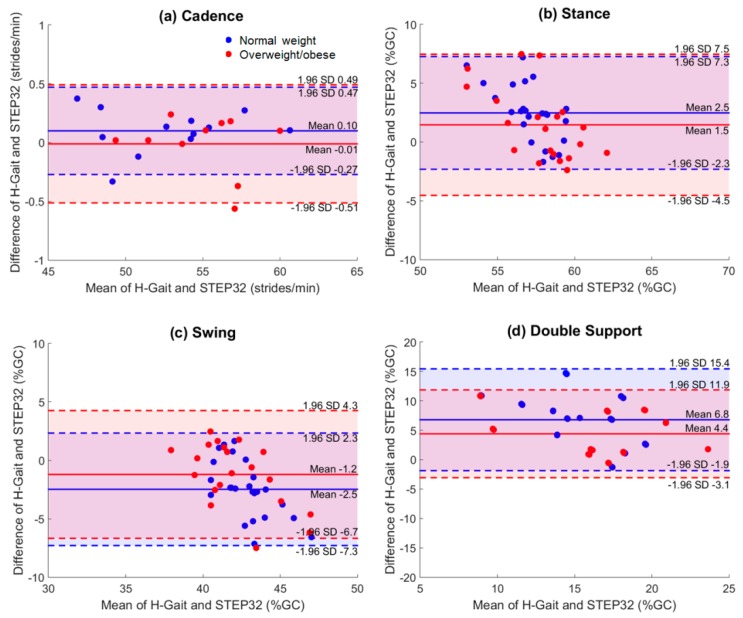
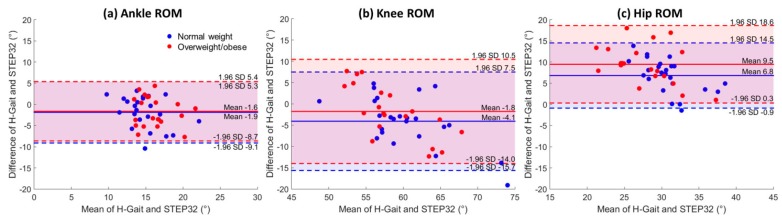
: Wearable magneto-inertial sensors are being increasingly used to obtain human motion measurements out of the lab, although their performance in applications requiring high accuracy, such as gait analysis, are still a subject of debate. The aim of this work was to validate a gait analysis system (H-Gait) based on magneto-inertial sensors, both in normal weight (NW) and overweight/obese (OW) subjects. The validation is performed against a reference multichannel recording system (STEP32), providing direct measurements of gait timings (through foot-switches) and joint angles in the sagittal plane (through electrogoniometers). : Twenty-two young male subjects were recruited for the study (12 NW, 10 OW). After positioning body-fixed sensors of both systems, each subject was asked to walk, at a self-selected speed, over a 14-m straight path for 12 trials. Gait signals were recorded, at the same time, with the two systems. Spatio-temporal parameters, ankle, knee, and hip joint kinematics were extracted analyzing an average of 89 ± 13 gait cycles from each lower limb. Intraclass correlation coefficient and Bland-Altmann plots were used to compare H-Gait and STEP32 measurements. Changes in gait parameters and joint kinematics of OW with respect NW were also evaluated. : The two systems were highly consistent for cadence, while a lower agreement was found for the other spatio-temporal parameters. Ankle and knee joint kinematics is overall comparable. Joint ROMs values were slightly lower for H-Gait with respect to STEP32 for the ankle (by 1.9° for NW, and 1.6° for OW) and for the knee (by 4.1° for NW, and 1.8° for OW). More evident differences were found for hip joint, with ROMs values higher for H-Gait (by 6.8° for NW, and 9.5° for OW). NW and OW showed significant differences considering STEP32 ( = 0.0004), but not H-Gait ( = 0.06). In particular, overweight/obese subjects showed a higher cadence (55.0 vs. 52.3 strides/min) and a lower hip ROM (23.0° vs. 27.3°) than normal weight subjects. : The two systems can be considered interchangeable for what concerns joint kinematics, except for the hip, where discrepancies were evidenced. Differences between normal and overweight/obese subjects were statistically significant using STEP32. The same tendency was observed using H-Gait.
可穿戴磁惯性传感器越来越多地用于在实验室外获得人体运动测量值,尽管它们在需要高精度的应用(如步态分析)中的性能仍存在争议。本研究旨在验证一种基于磁惯性传感器的步态分析系统(H-Gait),该系统适用于正常体重(NW)和超重/肥胖(OW)人群。验证是通过与参考多通道记录系统(STEP32)进行的,该系统直接测量步态时间(通过脚步开关)和矢状面的关节角度(通过电子测角计)。
研究招募了 22 名年轻男性受试者(12 名 NW,10 名 OW)。在为两个系统定位身体固定传感器后,要求每个受试者以自选择的速度在 14 米长的直道上行走 12 次。同时使用两个系统记录步态信号。从每个下肢平均分析 89 ± 13 个步态周期,提取时空参数、踝关节、膝关节和髋关节运动学。使用组内相关系数和 Bland-Altman 图比较 H-Gait 和 STEP32 的测量值。还评估了 OW 与 NW 相比步态参数和关节运动学的变化。
两种系统在步频方面高度一致,而其他时空参数的一致性较低。踝关节和膝关节运动学总体上是可比的。与 STEP32 相比,H-Gait 的踝关节(NW 为 1.9°,OW 为 1.6°)和膝关节(NW 为 4.1°,OW 为 1.8°)的关节活动度(ROM)值略低。髋关节的差异更为明显,H-Gait 的 ROM 值更高(NW 为 6.8°,OW 为 9.5°)。NW 和 OW 考虑 STEP32 时存在显著差异( = 0.0004),但考虑 H-Gait 时无显著差异( = 0.06)。特别是,超重/肥胖受试者的步频(55.0 比 52.3 步/分钟)较高,髋关节 ROM(23.0°比 27.3°)较低。
两种系统在关节运动学方面可以互换使用,除了髋关节,因为在那里发现了差异。使用 STEP32 时,正常体重和超重/肥胖受试者之间的差异具有统计学意义。使用 H-Gait 也观察到了相同的趋势。