King Abdullah University of Science and Technology (KAUST), Computational Bioscience Research Center (CBRC), Computer, Electrical and Mathematical Sciences and Engineering (CEMSE) Division, Thuwal, 23955-6900, Saudi Arabia.
High Performance Computer Research Center, Institute of Computing Technology, Chinese Academy of Sciences, Beijing 100190, China.
Bioinformatics. 2018 Mar 1;34(5):853-863. doi: 10.1093/bioinformatics/btx653.
Automatic alignment, especially fiducial marker-based alignment, has become increasingly important due to the high demand of subtomogram averaging and the rapid development of large-field electron microscopy. Among the alignment steps, fiducial marker tracking is a crucial one that determines the quality of the final alignment. Yet, it is still a challenging problem to track the fiducial markers accurately and effectively in a fully automatic manner.
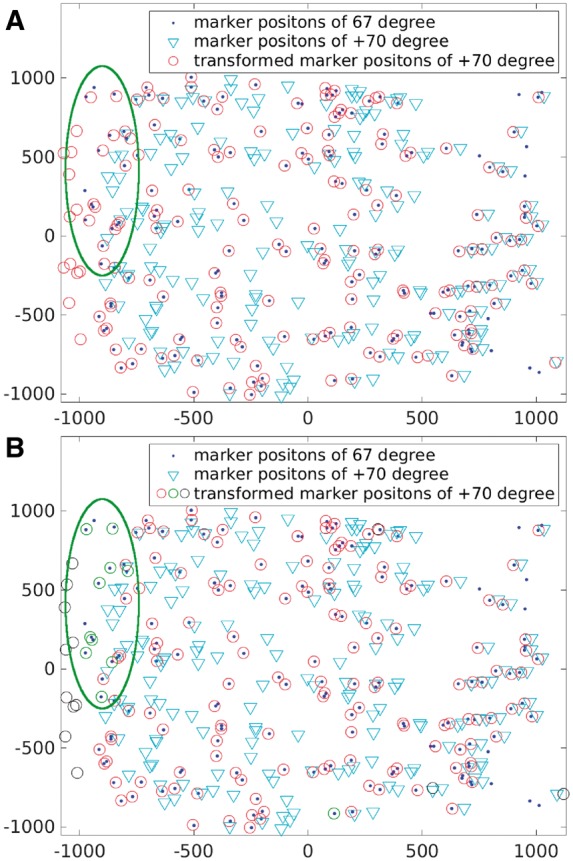
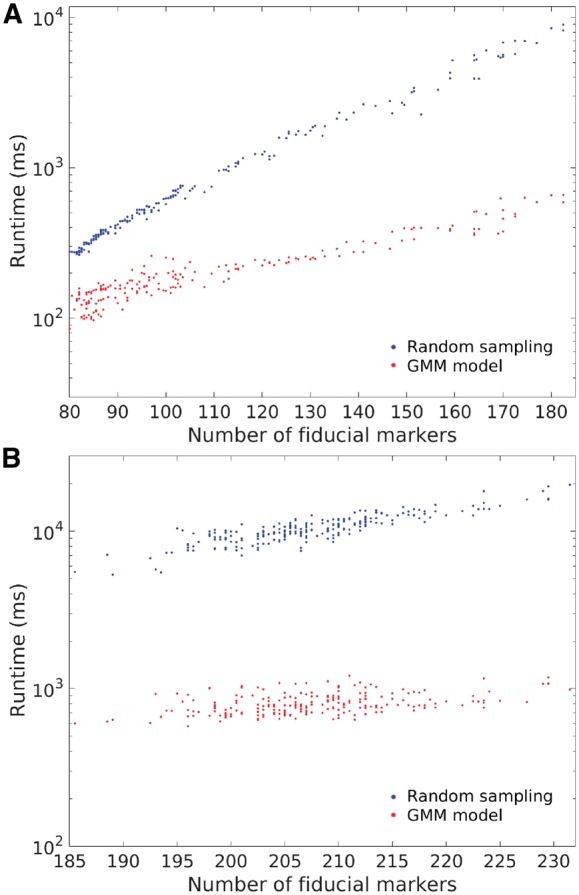
In this paper, we propose a robust and efficient scheme for fiducial marker tracking. Firstly, we theoretically prove the upper bound of the transformation deviation of aligning the positions of fiducial markers on two micrographs by affine transformation. Secondly, we design an automatic algorithm based on the Gaussian mixture model to accelerate the procedure of fiducial marker tracking. Thirdly, we propose a divide-and-conquer strategy against lens distortions to ensure the reliability of our scheme. To our knowledge, this is the first attempt that theoretically relates the projection model with the tracking model. The real-world experimental results further support our theoretical bound and demonstrate the effectiveness of our algorithm. This work facilitates the fully automatic tracking for datasets with a massive number of fiducial markers.
The C/C ++ source code that implements the fast fiducial marker tracking is available at https://github.com/icthrm/gmm-marker-tracking. Markerauto 1.6 version or later (also integrated in the AuTom platform at http://ear.ict.ac.cn/) offers a complete implementation for fast alignment, in which fast fiducial marker tracking is available by the '-t' option.
Supplementary data are available at Bioinformatics online.
由于亚细胞结构平均法和大视场电子显微镜的快速发展,自动配准(尤其是基于基准标记的配准)的需求日益增加。在配准步骤中,基准标记跟踪是决定最终配准质量的关键步骤。然而,以全自动方式准确有效地跟踪基准标记仍然是一个具有挑战性的问题。
在本文中,我们提出了一种用于基准标记跟踪的鲁棒且高效的方案。首先,我们从理论上证明了通过仿射变换对齐两个显微照片上的基准标记位置的变换偏差的上限。其次,我们设计了一种基于高斯混合模型的自动算法来加速基准标记跟踪的过程。第三,我们提出了一种针对透镜变形的分治策略,以确保我们方案的可靠性。据我们所知,这是首次从理论上关联投影模型和跟踪模型的尝试。实际的实验结果进一步支持了我们的理论界,并证明了我们算法的有效性。这项工作促进了具有大量基准标记的数据集的全自动跟踪。
实现快速基准标记跟踪的 C/C++ 源代码可在 https://github.com/icthrm/gmm-marker-tracking 上获得。Markerauto 1.6 版本或更高版本(也集成在 http://ear.ict.ac.cn/ 上的 AuTom 平台中)提供了完整的快速对齐实现,其中通过'-t'选项可提供快速基准标记跟踪。
补充数据可在《生物信息学》在线获取。