Dura-Bernal S, Neymotin S A, Kerr C C, Sivagnanam S, Majumdar A, Francis J T, Lytton W W
IBM J Res Dev. 2017 Mar-May;61(2-3):6.1-6.14. doi: 10.1147/JRD.2017.2656758. Epub 2017 May 23.
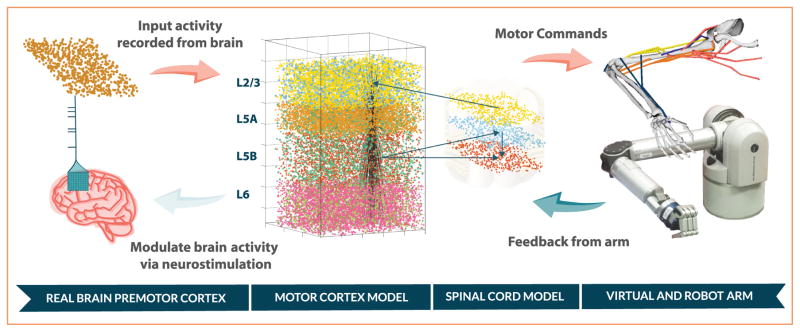
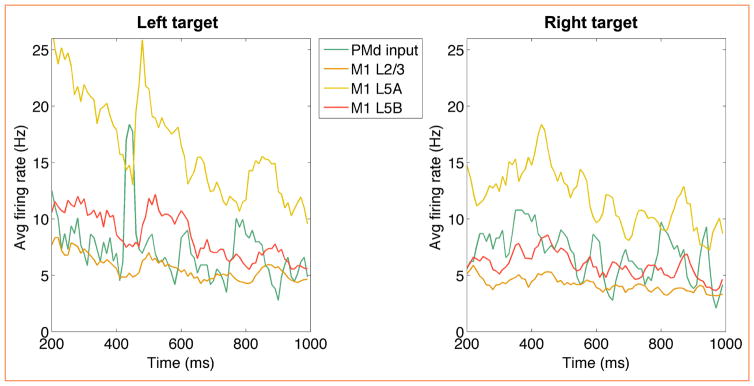
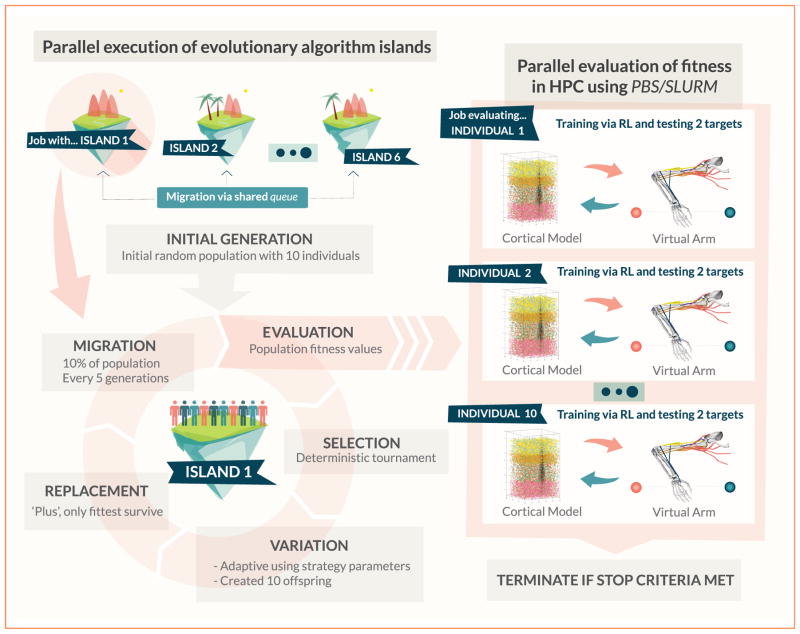
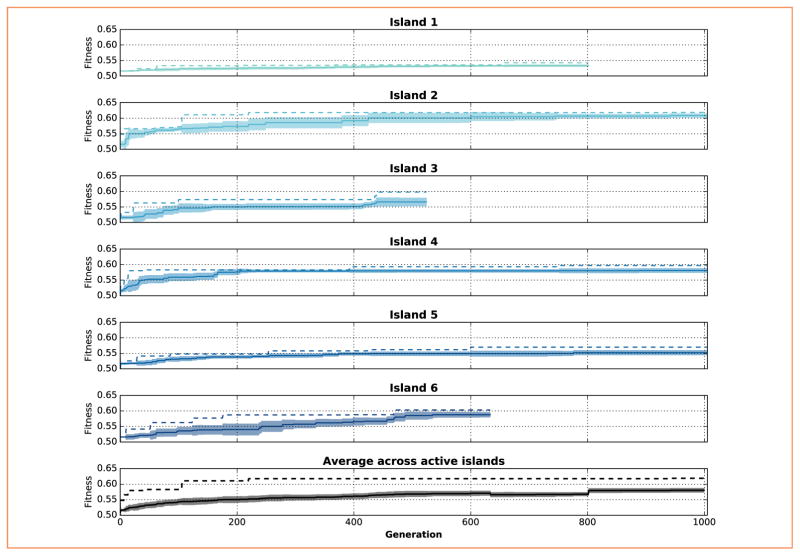
Biomimetic simulation permits neuroscientists to better understand the complex neuronal dynamics of the brain. Embedding a biomimetic simulation in a closed-loop neuroprosthesis, which can read and write signals from the brain, will permit applications for amelioration of motor, psychiatric, and memory-related brain disorders. Biomimetic neuroprostheses require real-time adaptation to changes in the external environment, thus constituting an example of a dynamic data-driven application system. As model fidelity increases, so does the number of parameters and the complexity of finding appropriate parameter configurations. Instead of adapting synaptic weights via machine learning, we employed major biological learning methods: spike-timing dependent plasticity and reinforcement learning. We optimized the learning metaparameters using evolutionary algorithms, which were implemented in parallel and which used an island model approach to obtain sufficient speed. We employed these methods to train a cortical spiking model to utilize macaque brain activity, indicating a selected target, to drive a virtual musculoskeletal arm with realistic anatomical and biomechanical properties to reach to that target. The optimized system was able to reproduce macaque data from a comparable experimental motor task. These techniques can be used to efficiently tune the parameters of multiscale systems, linking realistic neuronal dynamics to behavior, and thus providing a useful tool for neuroscience and neuroprosthetics.
仿生模拟使神经科学家能够更好地理解大脑复杂的神经元动力学。将仿生模拟嵌入闭环神经假体中,该假体能够读取和写入大脑信号,这将为改善运动、精神和与记忆相关的脑部疾病提供应用。仿生神经假体需要实时适应外部环境的变化,因此构成了一个动态数据驱动应用系统的例子。随着模型保真度的提高,参数数量以及找到合适参数配置的复杂性也会增加。我们没有通过机器学习来调整突触权重,而是采用了主要的生物学习方法:尖峰时间依赖可塑性和强化学习。我们使用进化算法优化学习元参数,这些算法并行实现,并采用岛屿模型方法以获得足够的速度。我们采用这些方法训练一个皮质尖峰模型,利用猕猴大脑活动(指示一个选定目标)来驱动具有逼真解剖学和生物力学特性的虚拟肌肉骨骼手臂到达该目标。优化后的系统能够从类似的实验性运动任务中重现猕猴数据。这些技术可用于有效调整多尺度系统的参数,将逼真的神经元动力学与行为联系起来,从而为神经科学和神经假体提供一个有用的工具。