1 Department of Engineering Mathematics, University of Bristol , Bristol, United Kingdom .
2 Bristol Robotics Laboratory , Bristol, United Kingdom .
Soft Robot. 2018 Apr;5(2):216-227. doi: 10.1089/soro.2017.0052. Epub 2018 Jan 3.
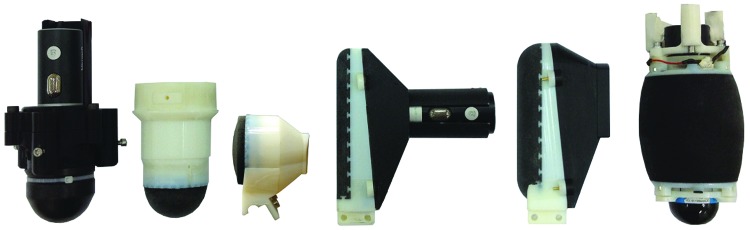
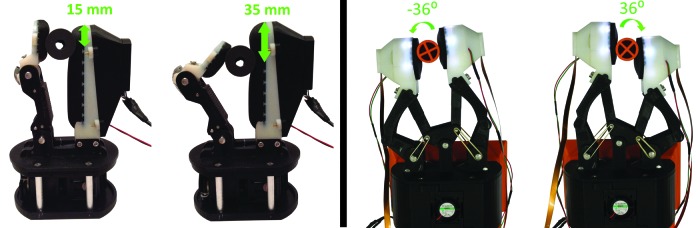
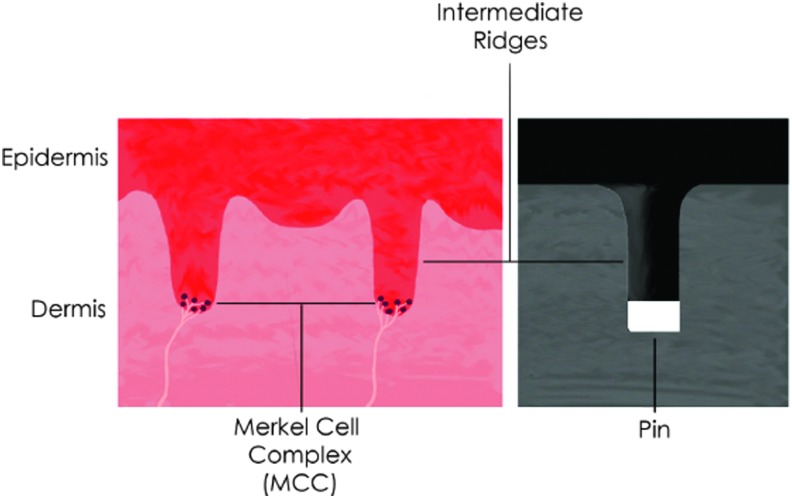
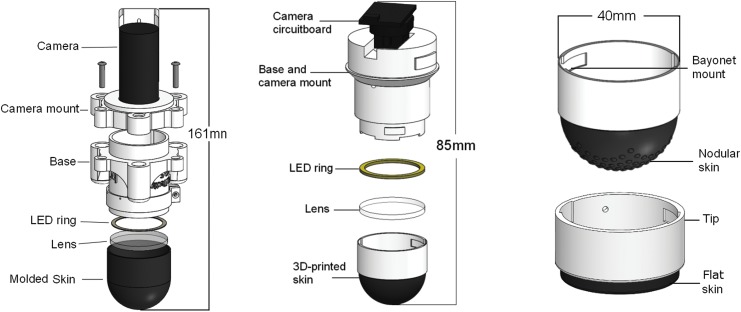
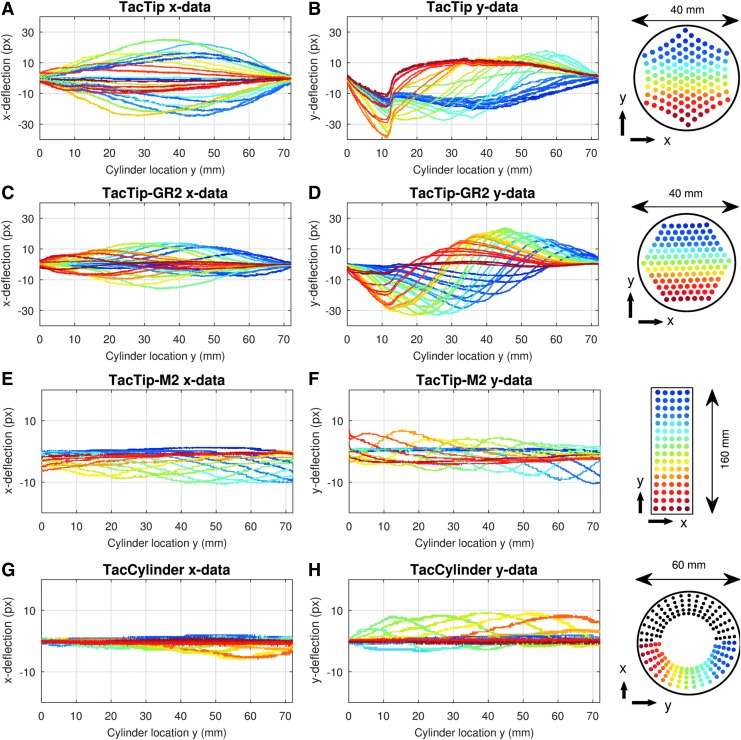
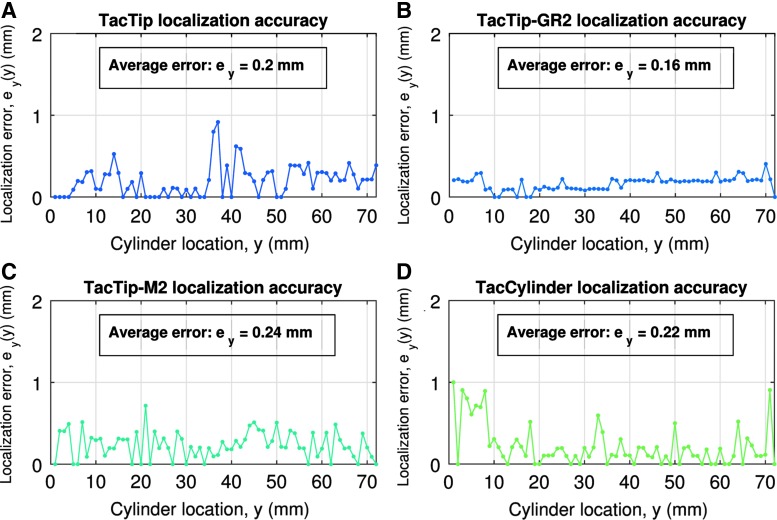
Tactile sensing is an essential component in human-robot interaction and object manipulation. Soft sensors allow for safe interaction and improved gripping performance. Here we present the TacTip family of sensors: a range of soft optical tactile sensors with various morphologies fabricated through dual-material 3D printing. All of these sensors are inspired by the same biomimetic design principle: transducing deformation of the sensing surface via movement of pins analogous to the function of intermediate ridges within the human fingertip. The performance of the TacTip, TacTip-GR2, TacTip-M2, and TacCylinder sensors is here evaluated and shown to attain submillimeter accuracy on a rolling cylinder task, representing greater than 10-fold super-resolved acuity. A version of the TacTip sensor has also been open-sourced, enabling other laboratories to adopt it as a platform for tactile sensing and manipulation research. These sensors are suitable for real-world applications in tactile perception, exploration, and manipulation, and will enable further research and innovation in the field of soft tactile sensing.
触觉感应是人机交互和物体操作的一个重要组成部分。软传感器允许进行安全的交互和提高抓取性能。在这里,我们提出了 TacTip 系列传感器:一系列具有不同形态的软光学触觉传感器,通过双材料 3D 打印制造。所有这些传感器都受到相同仿生设计原理的启发:通过类似于人指尖内部中间脊的功能的销钉运动来转换感应表面的变形。在这里评估了 TacTip、TacTip-GR2、TacTip-M2 和 TacCylinder 传感器的性能,并在滚动圆柱体任务上实现了亚毫米级的精度,代表了超过 10 倍的超分辨率敏锐度。TacTip 传感器的一个版本也已经开源,使其他实验室能够将其用作触觉感应和操作研究的平台。这些传感器适用于触觉感知、探索和操作的实际应用,并将促进软触觉感应领域的进一步研究和创新。