Daley Monica A
Structure and Motion Lab, Royal Veterinary College, Hawkshead Lane, Hertfordshire, AL9 7TA, UK.
Integr Comp Biol. 2018 Nov 1;58(5):884-893. doi: 10.1093/icb/icy058.
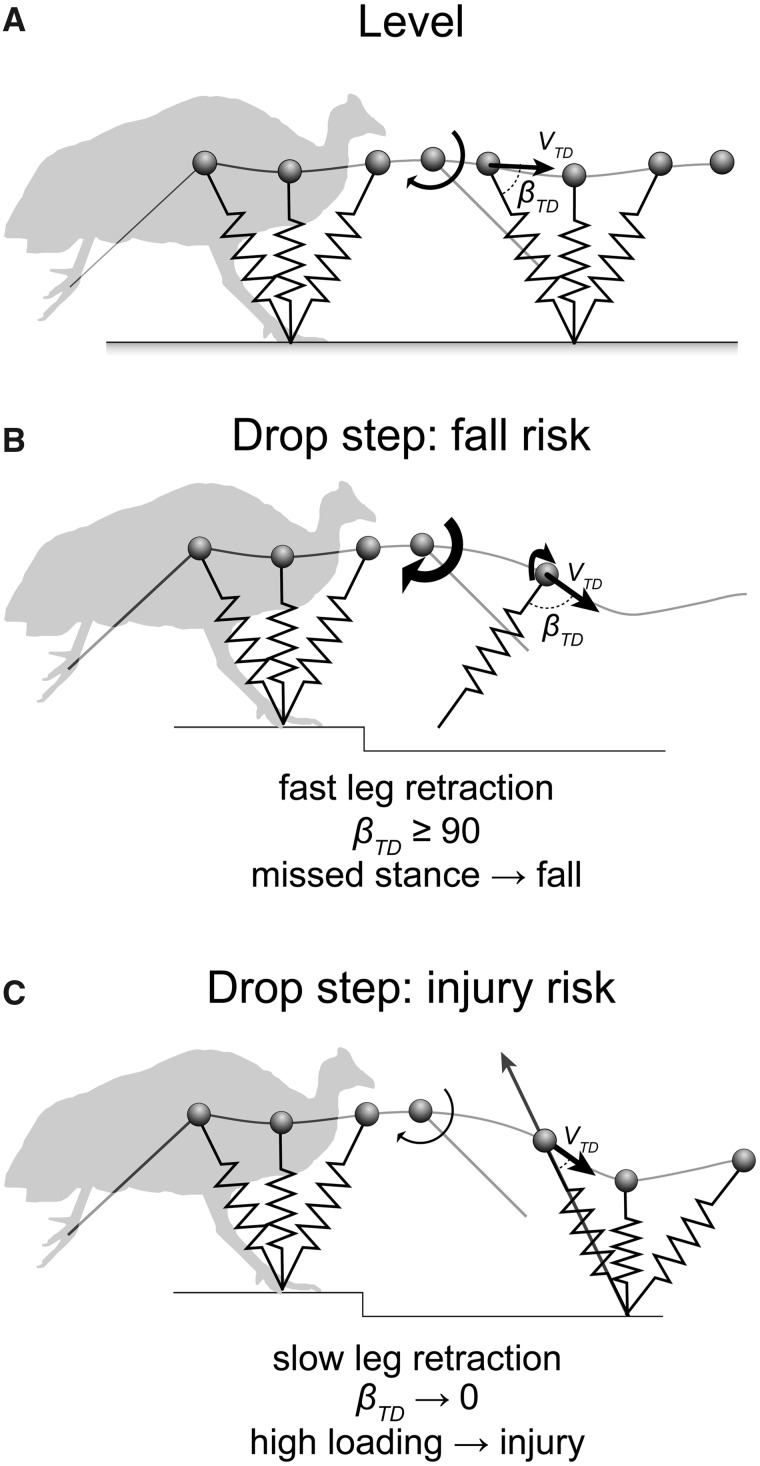
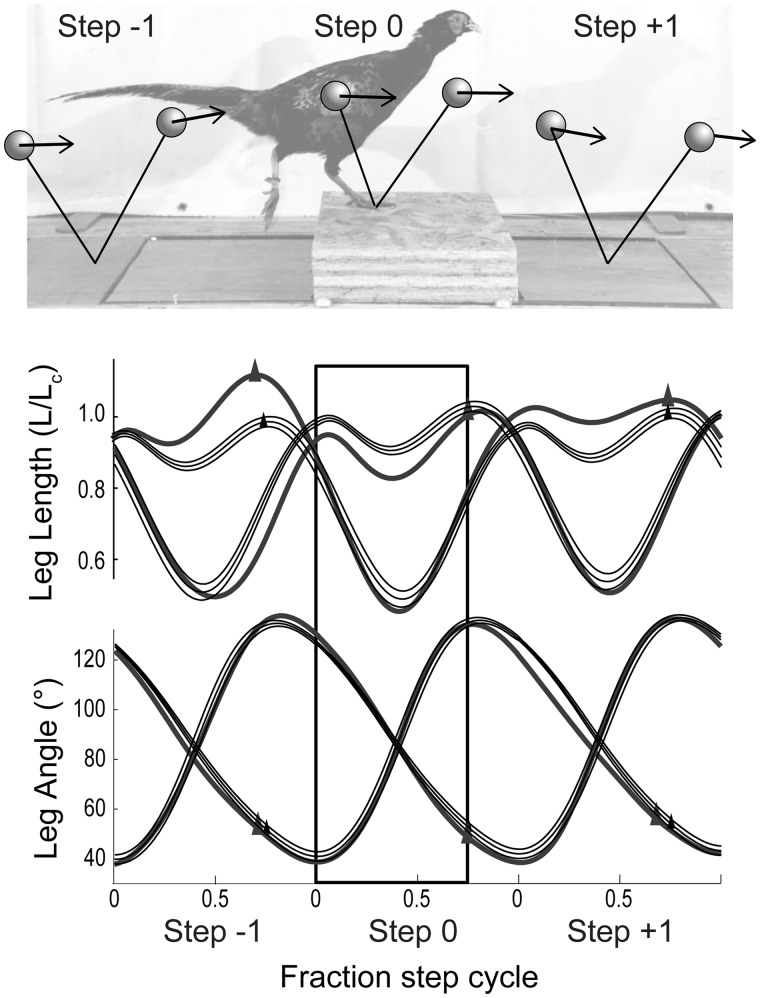
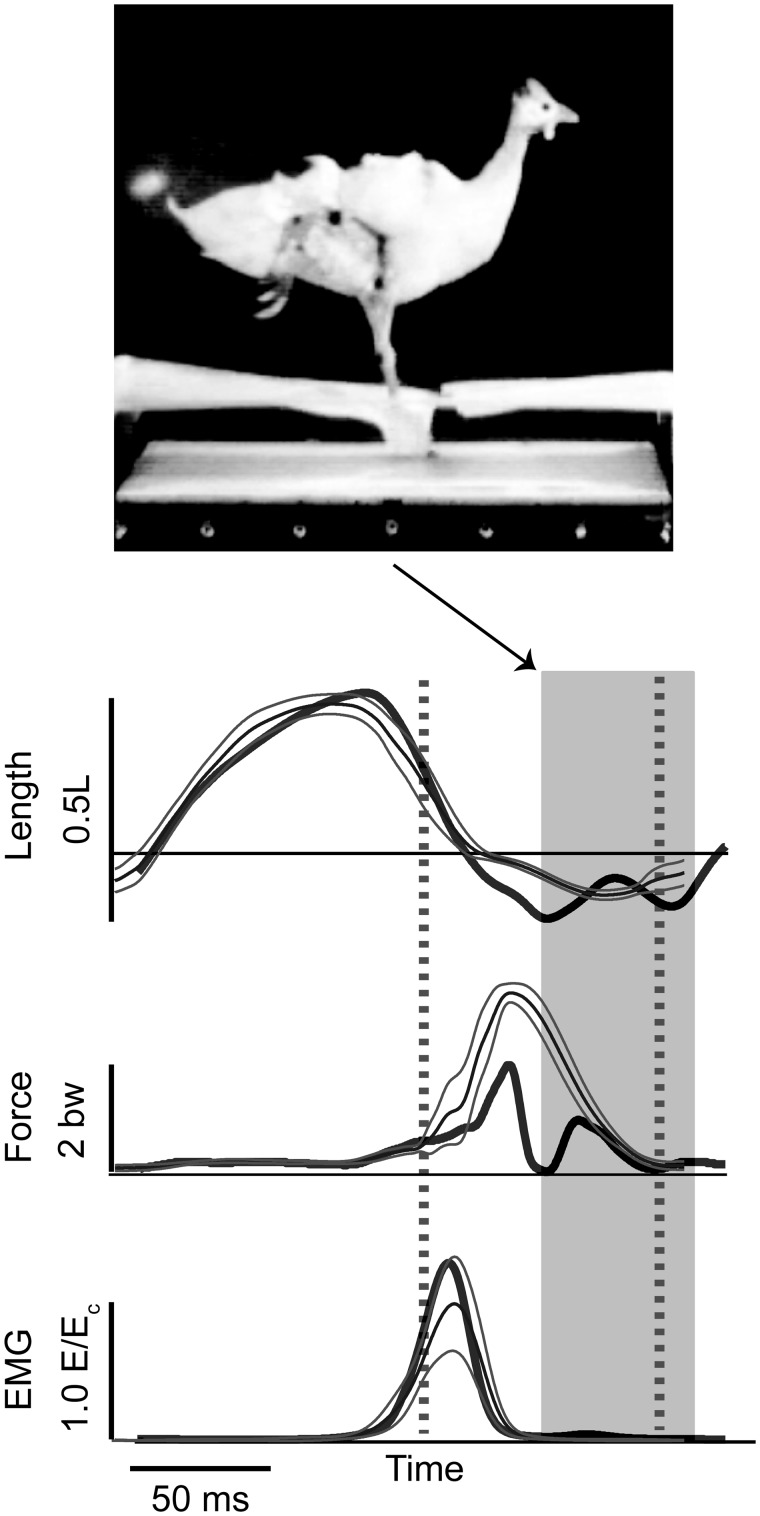
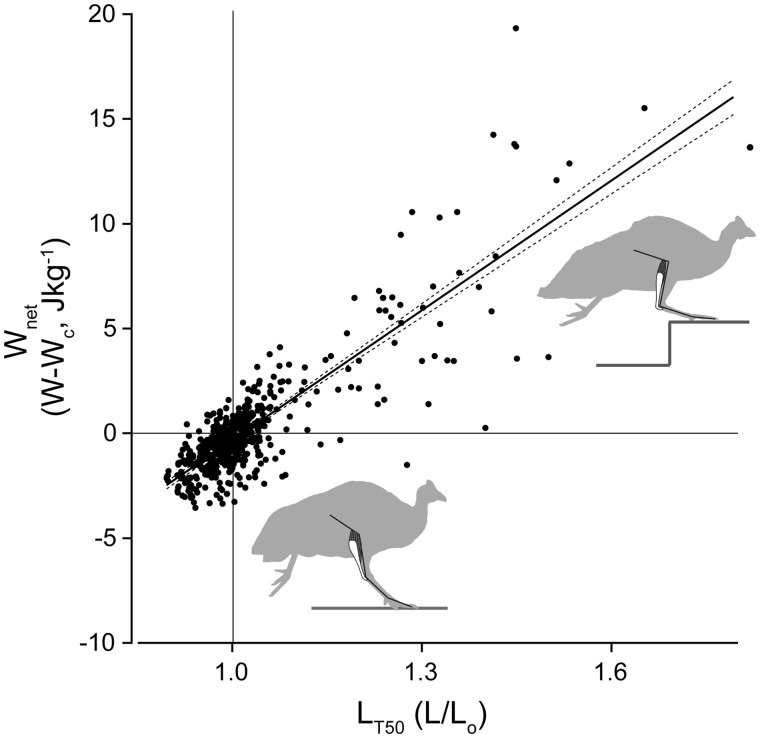
Birds are a diverse and agile lineage of vertebrates that all use bipedal locomotion for at least part of their life. Thus birds provide a valuable opportunity to investigate how biomechanics and sensorimotor control are integrated for agile bipedal locomotion. This review summarizes recent work using terrain perturbations to reveal neuromechanical control strategies used by ground birds to achieve robust, stable, and agile running. Early experiments in running guinea fowl aimed to reveal the immediate intrinsic mechanical response to an unexpected drop ("pothole") in terrain. When navigating the pothole, guinea fowl experience large changes in leg posture in the perturbed step, which correlates strongly with leg loading and perturbation recovery. Analysis of simple theoretical models of running has further confirmed the crucial role of swing-leg trajectory control for regulating foot contact timing and leg loading in uneven terrain. Coupling between body and leg dynamics results in an inherent trade-off in swing leg retraction rate for fall avoidance versus injury avoidance. Fast leg retraction minimizes injury risk, but slow leg retraction minimizes fall risk. Subsequent experiments have investigated how birds optimize their control strategies depending on the type of perturbation (pothole, step, obstacle), visibility of terrain, and with ample practice negotiating terrain features. Birds use several control strategies consistently across terrain contexts: (1) independent control of leg angular cycling and leg length actuation, which facilitates dynamic stability through simple control mechanisms, (2) feedforward regulation of leg cycling rate, which tunes foot-contact timing to maintain consistent leg loading in uneven terrain (minimizing fall and injury risks), (3) load-dependent muscle actuation, which rapidly adjusts stance push-off and stabilizes body mechanical energy, and (4) multi-step recovery strategies that allow body dynamics to transiently vary while tightly regulating leg loading to minimize risks of fall and injury. In future work, it will be interesting to investigate the learning and adaptation processes that allow animals to adjust neuromechanical control mechanisms over short and long timescales.
鸟类是脊椎动物中多样化且灵活的一个类群,它们在生命的至少部分阶段都采用双足运动。因此,鸟类为研究生物力学和感觉运动控制如何整合以实现灵活的双足运动提供了宝贵的机会。这篇综述总结了近期利用地形扰动来揭示地面鸟类用于实现稳健、稳定和灵活奔跑的神经力学控制策略的研究工作。早期对奔跑中的珠鸡进行的实验旨在揭示其对地形意外下降(“坑洼”)的即时内在机械反应。在穿越坑洼时,珠鸡在受扰动的步幅中腿部姿势会发生很大变化,这与腿部负荷和扰动恢复密切相关。对简单奔跑理论模型的分析进一步证实了摆动腿轨迹控制在调节不平坦地形中的足部接触时间和腿部负荷方面的关键作用。身体和腿部动力学之间的耦合导致在避免跌倒与避免受伤之间,摆动腿回缩速率存在内在的权衡。快速的腿部回缩可将受伤风险降至最低,但缓慢的腿部回缩可将跌倒风险降至最低。后续实验研究了鸟类如何根据扰动类型(坑洼、台阶、障碍物)、地形可见性以及有足够的练习来应对地形特征等因素优化其控制策略。鸟类在不同地形环境中始终使用几种控制策略:(1)独立控制腿部角度循环和腿部长度驱动,这通过简单的控制机制促进动态稳定性;(2)腿部循环速率的前馈调节,可调整足部接触时间以在不平坦地形中保持一致的腿部负荷(将跌倒和受伤风险降至最低);(3)依赖负荷的肌肉驱动,可快速调整站立蹬地并稳定身体机械能;(4)多步恢复策略,使身体动力学能够短暂变化,同时严格调节腿部负荷以将跌倒和受伤风险降至最低。在未来的工作中,研究允许动物在短期和长期时间尺度上调整神经力学控制机制的学习和适应过程将很有趣。