School of Psychology, University of Birmingham, Birmingham, UK.
Sci Rep. 2018 Jun 14;8(1):9121. doi: 10.1038/s41598-018-27378-1.
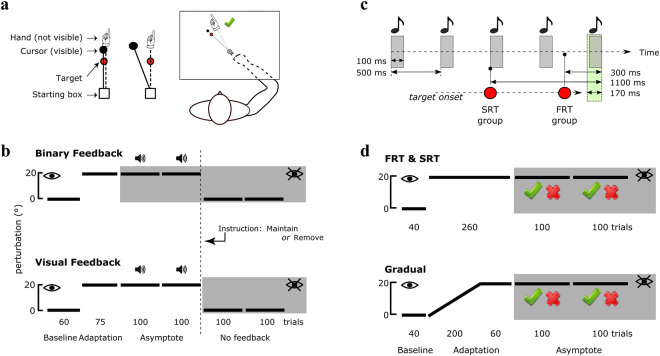
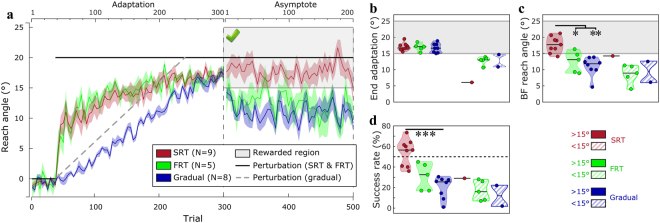
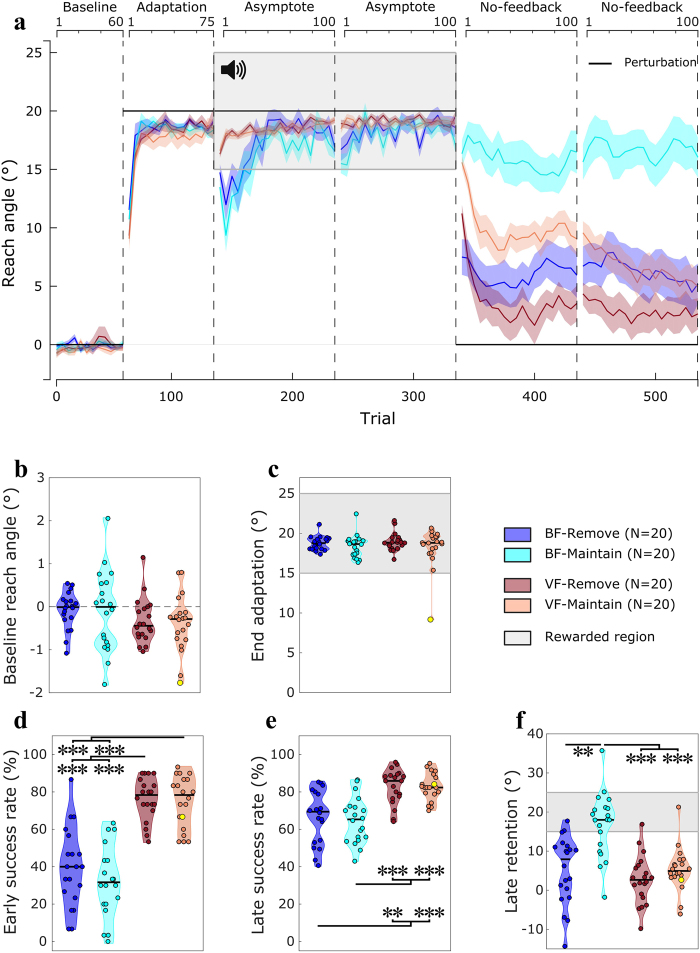
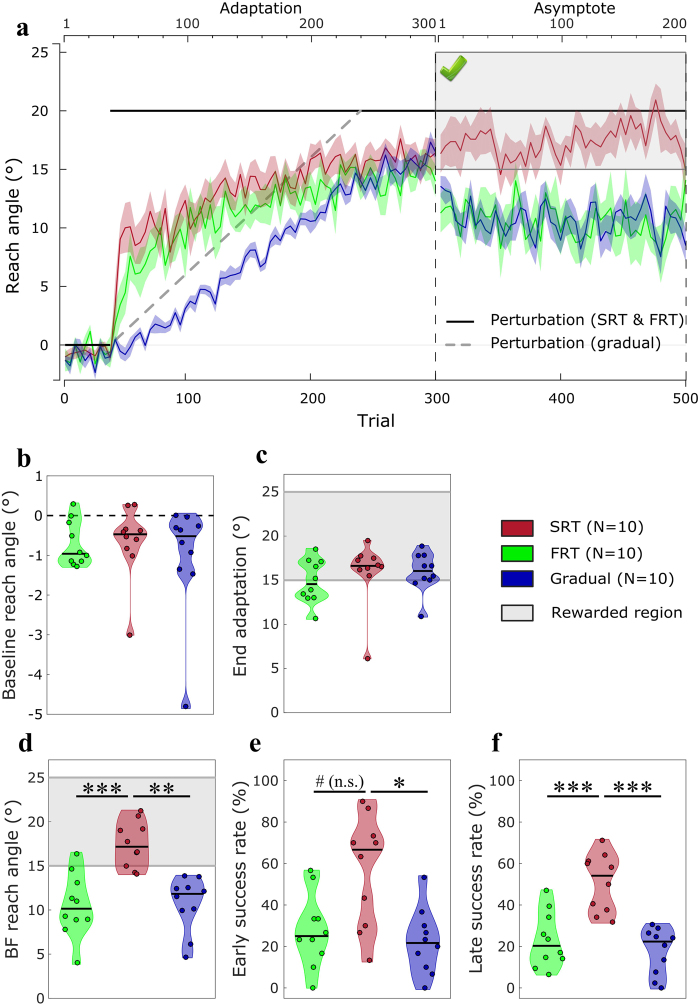
The motor system's ability to adapt to environmental changes is essential for maintaining accurate movements. Such adaptation recruits several distinct systems: cerebellar sensory-prediction error learning, success-based reinforcement, and explicit control. Although much work has focused on the relationship between cerebellar learning and explicit control, there is little research regarding how reinforcement and explicit control interact. To address this, participants first learnt a 20° visuomotor displacement. After reaching asymptotic performance, binary, hit-or-miss feedback (BF) was introduced either with or without visual feedback, the latter promoting reinforcement. Subsequently, retention was assessed using no-feedback trials, with half of the participants in each group being instructed to stop aiming off target. Although BF led to an increase in retention of the visuomotor displacement, instructing participants to stop re-aiming nullified this effect, suggesting explicit control is critical to BF-based reinforcement. In a second experiment, we prevented the expression or development of explicit control during BF performance, by either constraining participants to a short preparation time (expression) or by introducing the displacement gradually (development). Both manipulations strongly impaired BF performance, suggesting reinforcement requires both recruitment and expression of an explicit component. These results emphasise the pivotal role explicit control plays in reinforcement-based motor learning.
运动系统适应环境变化的能力对于维持准确的运动至关重要。这种适应涉及几个不同的系统:小脑感觉预测误差学习、基于成功的强化和显式控制。尽管许多工作都集中在小脑学习和显式控制之间的关系上,但关于强化和显式控制如何相互作用的研究却很少。为了解决这个问题,参与者首先学习了 20°的视觉运动位移。达到渐近性能后,引入了二进制的命中或错过反馈(BF),无论是否有视觉反馈,后者都促进了强化。随后,使用无反馈试验评估保留情况,每组一半的参与者被指示停止偏离目标瞄准。尽管 BF 导致视觉运动位移的保留增加,但指示参与者停止重新瞄准会消除这种效果,这表明显式控制对于基于 BF 的强化至关重要。在第二个实验中,我们通过限制参与者的准备时间(表达)或逐渐引入位移(发展)来防止 BF 期间显式控制的表达或发展。这两种操作都严重损害了 BF 的表现,这表明强化需要显式成分的招募和表达。这些结果强调了显式控制在基于强化的运动学习中所起的关键作用。