College of Engineering, South China Agricultural University, Wushan Road, Guangzhou 510642, China.
National Center for International Collaboration Research on Precision Agricultural Aviation Pesticide Spraying Technology, Wushan Road, Guangzhou 510624, China.
Sensors (Basel). 2018 Oct 1;18(10):3299. doi: 10.3390/s18103299.
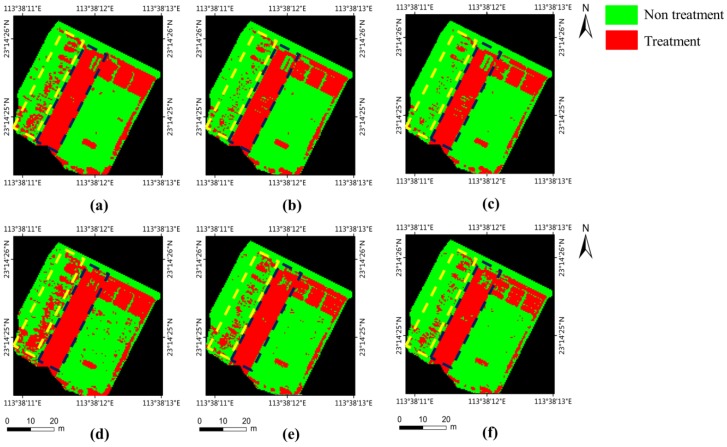
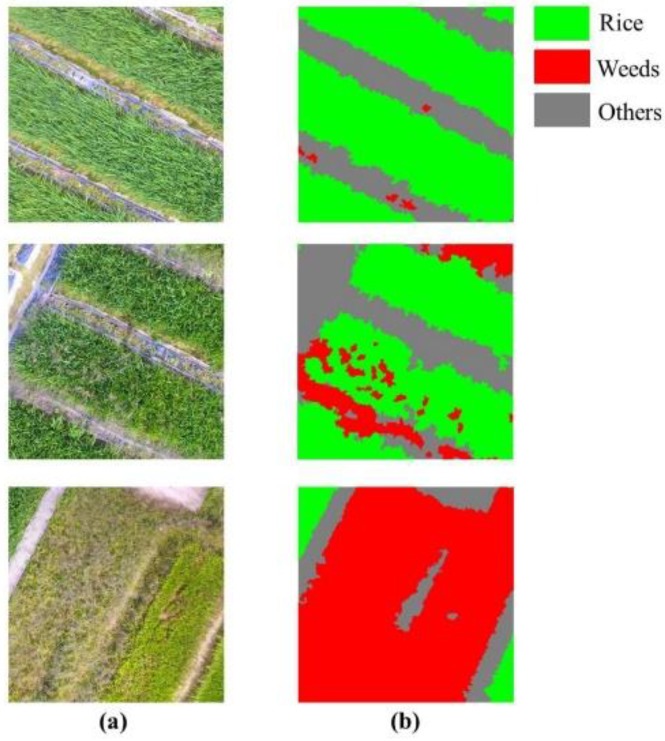
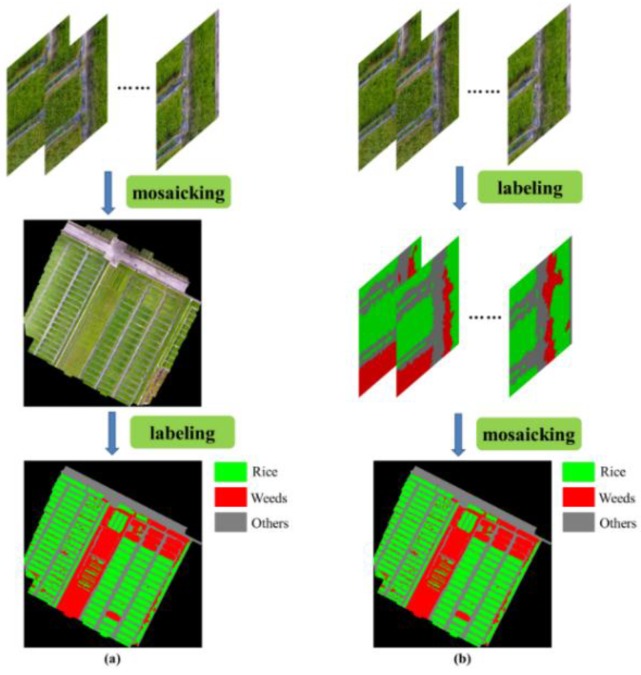
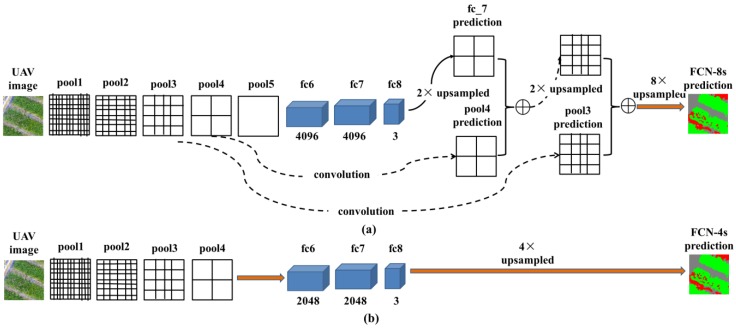
Chemical control is necessary in order to control weed infestation and to ensure a rice yield. However, excessive use of herbicides has caused serious agronomic and environmental problems. Site specific weed management (SSWM) recommends an appropriate dose of herbicides according to the weed coverage, which may reduce the use of herbicides while enhancing their chemical effects. In the context of SSWM, the weed cover map and prescription map must be generated in order to carry out the accurate spraying. In this paper, high resolution unmanned aerial vehicle (UAV) imagery were captured over a rice field. Different workflows were evaluated to generate the weed cover map for the whole field. Fully convolutional networks (FCN) was applied for a pixel-level classification. Theoretical analysis and practical evaluation were carried out to seek for an architecture improvement and performance boost. A chessboard segmentation process was used to build the grid framework of the prescription map. The experimental results showed that the overall accuracy and mean intersection over union (mean IU) for weed mapping using FCN-4s were 0.9196 and 0.8473, and the total time (including the data collection and data processing) required to generate the weed cover map for the entire field (50 × 60 m) was less than half an hour. Different weed thresholds (0.00⁻0.25, with an interval of 0.05) were used for the prescription map generation. High accuracies (above 0.94) were observed for all of the threshold values, and the relevant herbicide saving ranged from 58.3% to 70.8%. All of the experimental results demonstrated that the method used in this work has the potential to produce an accurate weed cover map and prescription map in SSWM applications.
为了控制杂草滋生,确保水稻产量,需要进行化学防治。然而,过度使用除草剂会导致严重的农业和环境问题。特定地点杂草管理(SSWM)建议根据杂草覆盖率使用适当剂量的除草剂,这可能会减少除草剂的使用量,同时增强其化学效果。在 SSWM 的背景下,必须生成杂草覆盖图和处方图,以便进行精确喷洒。本文在稻田上空拍摄了高分辨率的无人机(UAV)图像。评估了不同的工作流程,以生成整个田地的杂草覆盖图。全卷积网络(FCN)用于像素级分类。进行了理论分析和实际评估,以寻求架构改进和性能提升。使用棋盘分割过程构建处方图的网格框架。实验结果表明,使用 FCN-4s 进行杂草制图的总体准确率和平均交并比(mean IU)分别为 0.9196 和 0.8473,生成整个田地(50×60 m)的杂草覆盖图所需的总时间(包括数据采集和数据处理)不到半小时。为处方图生成使用了不同的杂草阈值(0.00⁻0.25,间隔为 0.05)。所有阈值的准确率都在 0.94 以上,相关的除草剂节省率在 58.3%至 70.8%之间。所有实验结果表明,本工作中使用的方法具有在 SSWM 应用中生成准确的杂草覆盖图和处方图的潜力。