Graduate School of Life and Environmental Sciences, University of Tsukuba, Tsukuba 305-8572, Japan.
Faculty of Life and Environmental Sciences, University of Tsukuba, 1-1-1 Tennodai, Tsukuba 305-8572, Japan.
Sensors (Basel). 2019 Jan 14;19(2):313. doi: 10.3390/s19020313.
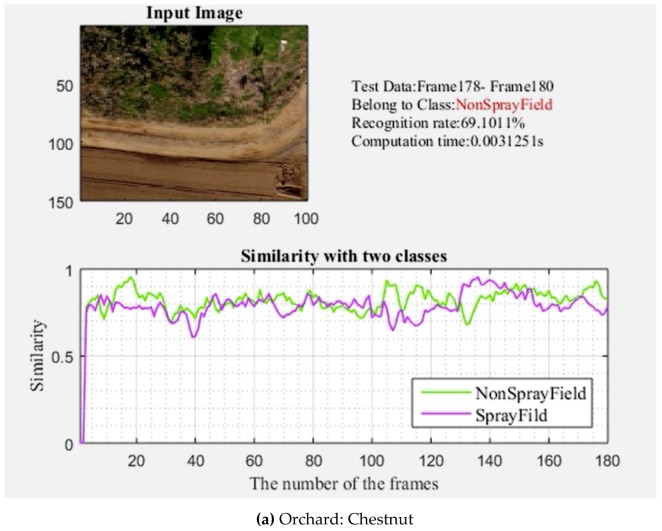
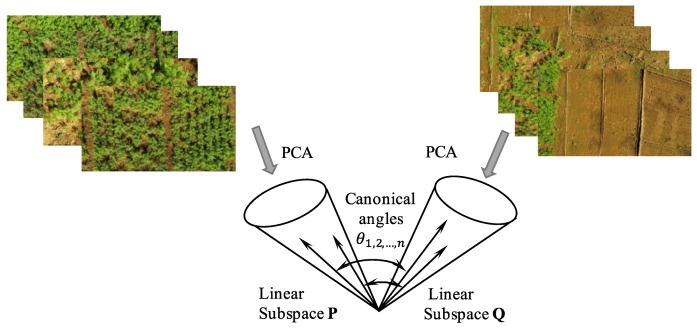
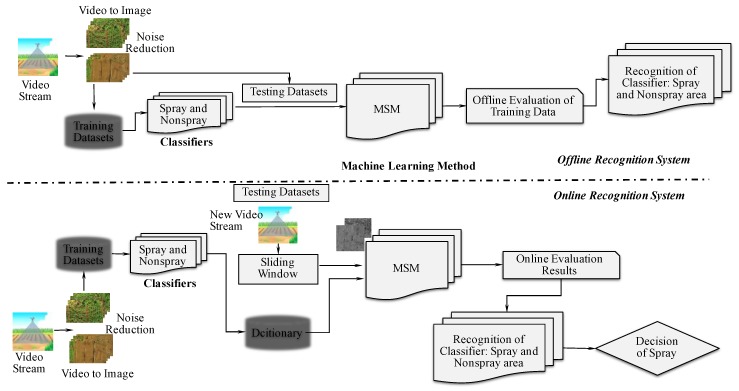
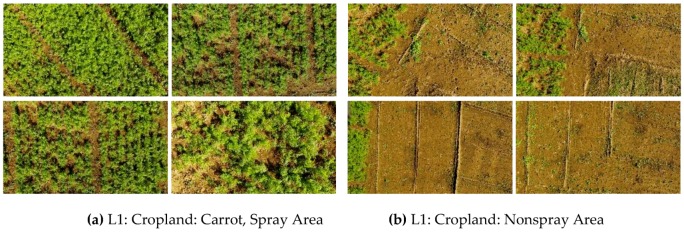
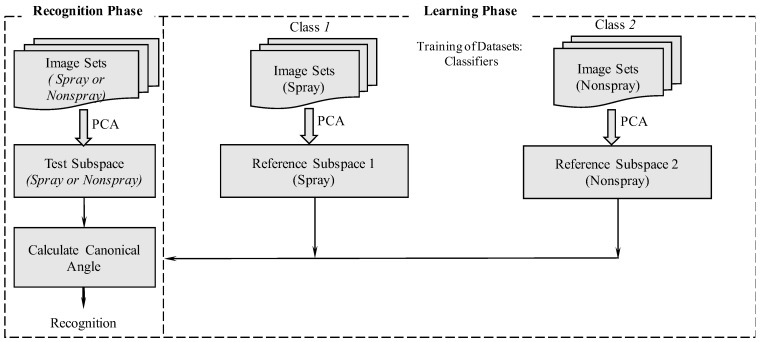
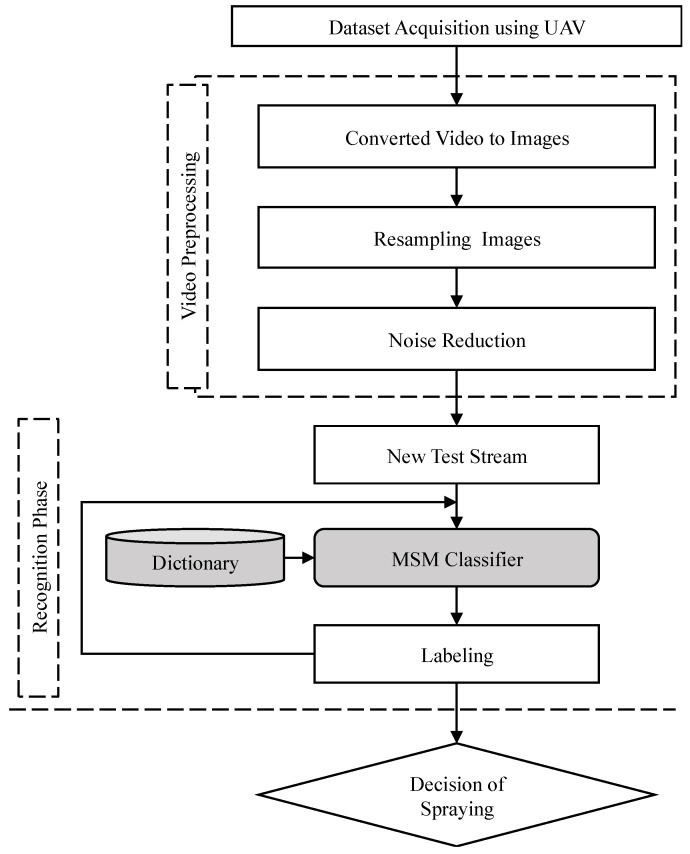
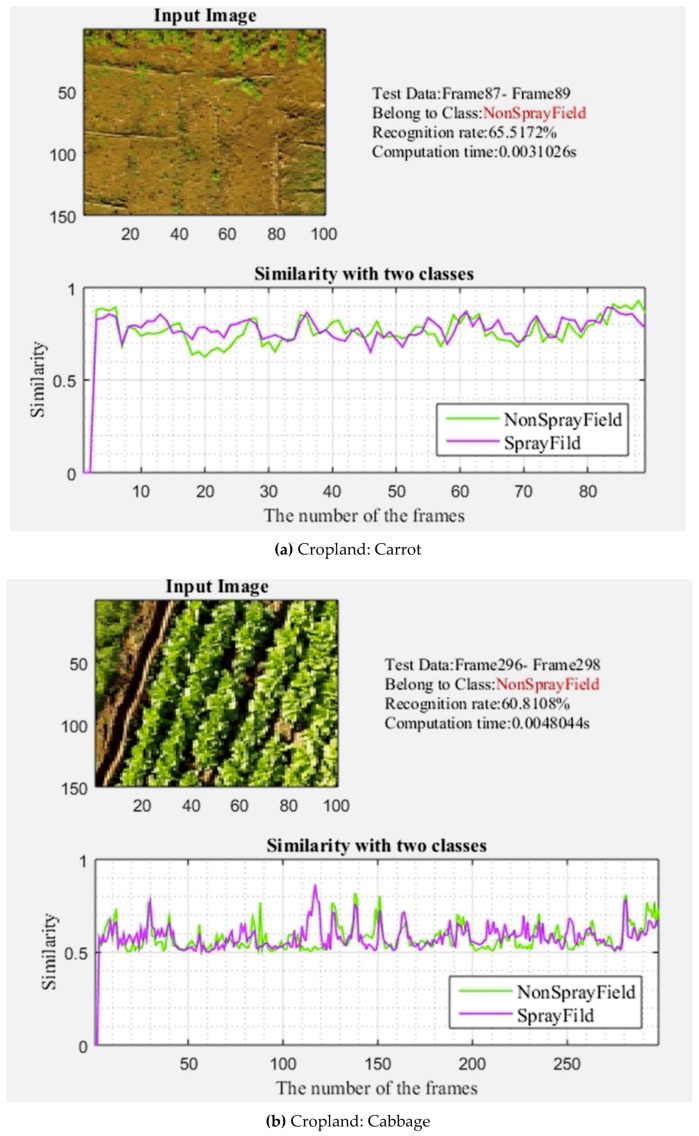
Unmanned aerial vehicle (UAV)-based spraying systems have recently become important for the precision application of pesticides, using machine learning approaches. Therefore, the objective of this research was to develop a machine learning system that has the advantages of high computational speed and good accuracy for recognizing spray and non-spray areas for UAV-based sprayers. A machine learning system was developed by using the mutual subspace method (MSM) for images collected from a UAV. Two target lands: agricultural croplands and orchard areas, were considered in building two classifiers for distinguishing spray and non-spray areas. The field experiments were conducted in target areas to train and test the system by using a commercial UAV (DJI Phantom 3 Pro) with an onboard 4K camera. The images were collected from low (5 m) and high (15 m) altitudes for croplands and orchards, respectively. The recognition system was divided into offline and online systems. In the offline recognition system, 74.4% accuracy was obtained for the classifiers in recognizing spray and non-spray areas for croplands. In the case of orchards, the average classifier recognition accuracy of spray and non-spray areas was 77%. On the other hand, the online recognition system performance had an average accuracy of 65.1% for croplands, and 75.1% for orchards. The computational time for the online recognition system was minimal, with an average of 0.0031 s for classifier recognition. The developed machine learning system had an average recognition accuracy of 70%, which can be implemented in an autonomous UAV spray system for recognizing spray and non-spray areas for real-time applications.
基于无人机 (UAV) 的喷雾系统最近已成为使用机器学习方法对农药进行精确应用的重要手段。因此,本研究的目的是开发一种具有高计算速度和良好准确性的机器学习系统,用于识别基于无人机的喷雾器的喷雾和非喷雾区域。通过使用互子空间方法 (MSM) 为从无人机收集的图像开发了一个机器学习系统。为了区分喷雾和非喷雾区域,针对两个目标区域:农业耕地和果园区域,构建了两个分类器。在目标区域进行了田间试验,使用具有机载 4K 摄像机的商用无人机 (DJI Phantom 3 Pro) 对系统进行训练和测试。分别从低(5 米)和高(15 米)高度采集了耕地和果园的图像。识别系统分为离线和在线系统。在离线识别系统中,分类器对耕地的喷雾和非喷雾区域的识别准确率达到了 74.4%。在果园的情况下,喷雾和非喷雾区域的平均分类器识别准确率为 77%。另一方面,在线识别系统对耕地的平均准确率为 65.1%,对果园的平均准确率为 75.1%。在线识别系统的计算时间最短,分类器识别的平均时间为 0.0031 秒。开发的机器学习系统的平均识别准确率为 70%,可用于实时应用的自主式 UAV 喷雾系统,用于识别喷雾和非喷雾区域。