Department of Mechanical Engineering, Vanderbilt University, Nashville, Tennessee.
Department of Mechanical Engineering, University of Arkansas, Fayetteville, Arkansas.
Soft Robot. 2019 Oct;6(5):671-684. doi: 10.1089/soro.2018.0131. Epub 2019 Jun 25.
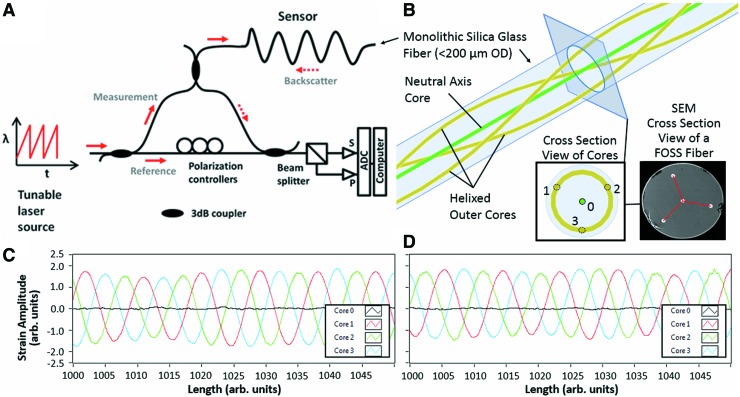
While soft material actuators can undergo large deformations to execute very complex motions, what is critically lacking in soft material robotic systems is the ability to collect high-resolution shape information for sophisticated functions such as environmental mapping, collision detection, and full state feedback control. This work explores the potential of a nearly commercial fiber optic shape sensor (FOSS) and presents the first demonstrations of a monolithic, multicore FOSS integrated into the structure of a fiber-reinforced soft actuator. In this pilot study, we report an open loop sensorized soft actuator capable of submillimeter position feedback that can detect the soft actuator's shape, environmental shapes, collision locations, and material stiffness properties.
虽然软材料执行器可以进行大变形以执行非常复杂的运动,但软材料机器人系统中严重缺乏的是收集高分辨率形状信息的能力,而这种能力对于复杂的功能(如环境映射、碰撞检测和全状态反馈控制)是必不可少的。这项工作探索了一种近乎商业化的光纤形状传感器(FOSS)的潜力,并首次展示了将单片多芯 FOSS 集成到纤维增强软执行器结构中的成果。在这项初步研究中,我们报告了一种能够进行亚毫米级位置反馈的开环传感器软执行器,它可以检测软执行器的形状、环境形状、碰撞位置和材料硬度特性。