Kellner James R, Armston John, Birrer Markus, Cushman K C, Duncanson Laura, Eck Christoph, Falleger Christoph, Imbach Benedikt, Král Kamil, Krůček Martin, Trochta Jan, Vrška Tomáš, Zgraggen Carlo
1Institute at Brown for Environment and Society, Brown University, 85 Waterman Street, Providence, RI 02912 USA.
2Department of Ecology and Evolutionary Biology, Brown University, 80 Waterman Street, Providence, RI 02912 USA.
Surv Geophys. 2019;40(4):959-977. doi: 10.1007/s10712-019-09529-9. Epub 2019 May 4.
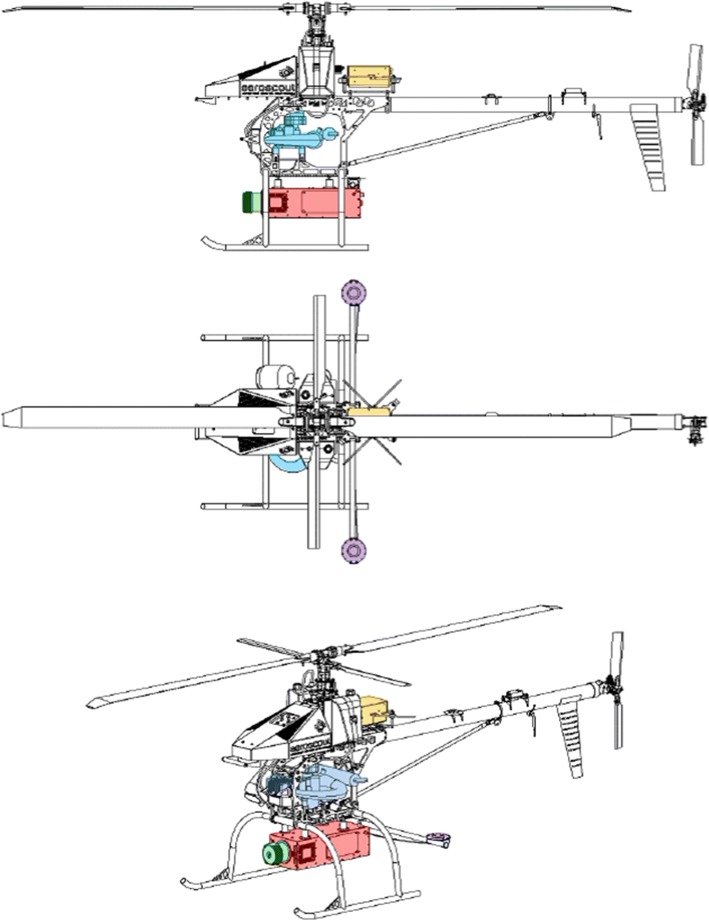
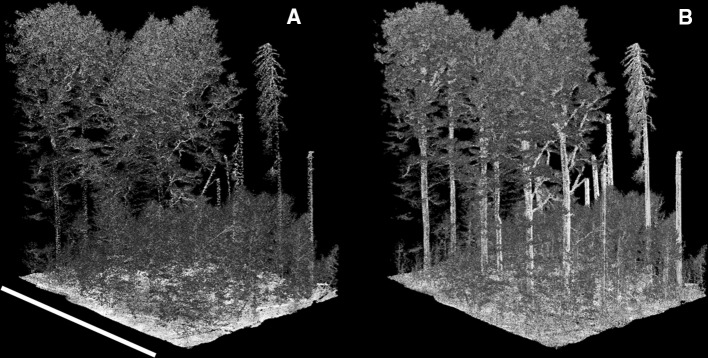
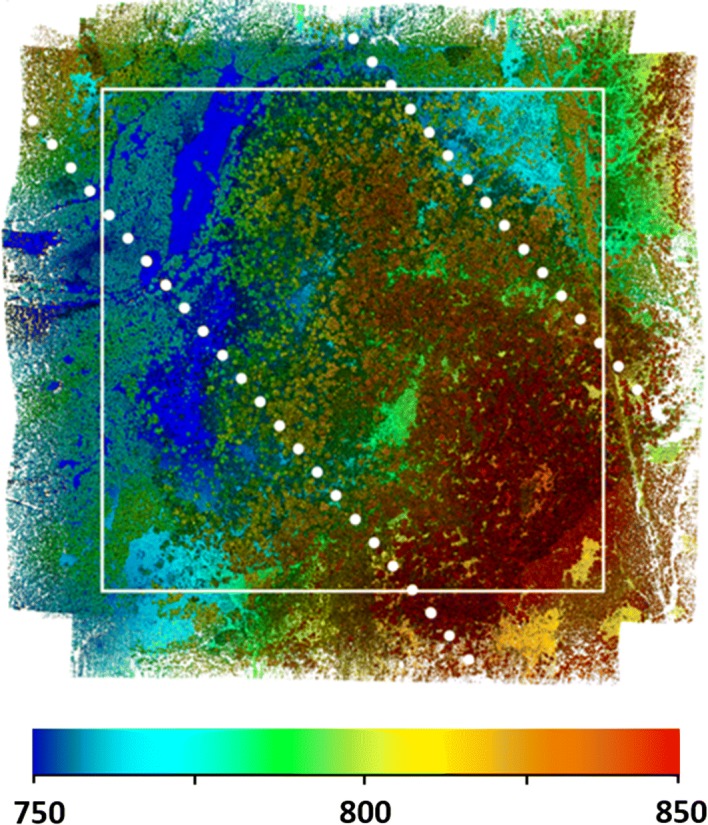
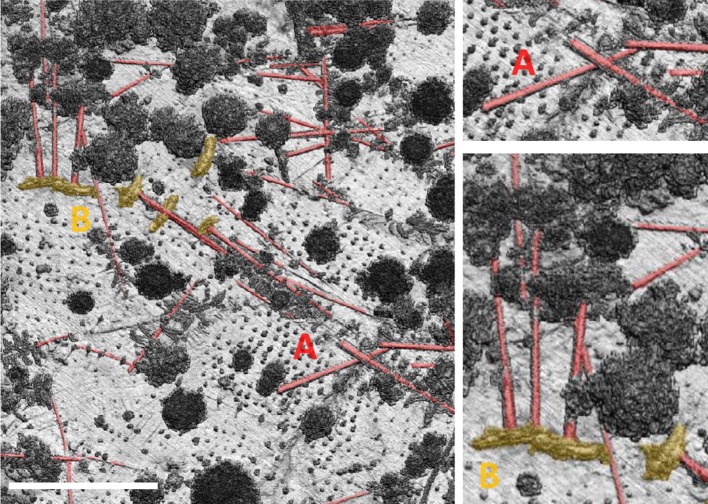
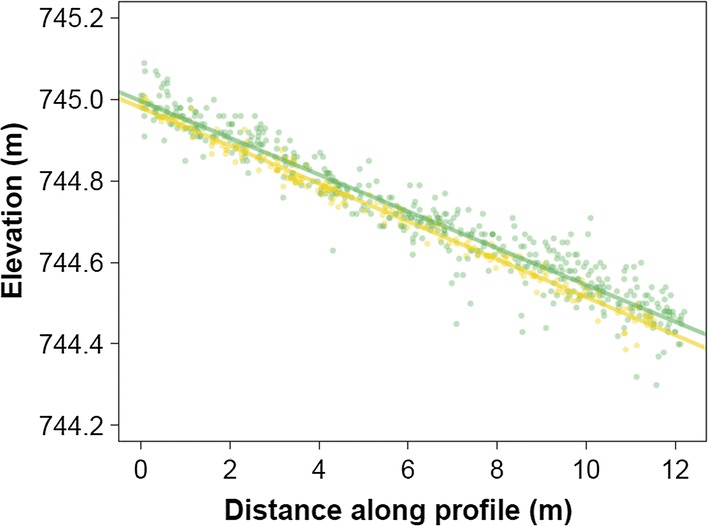
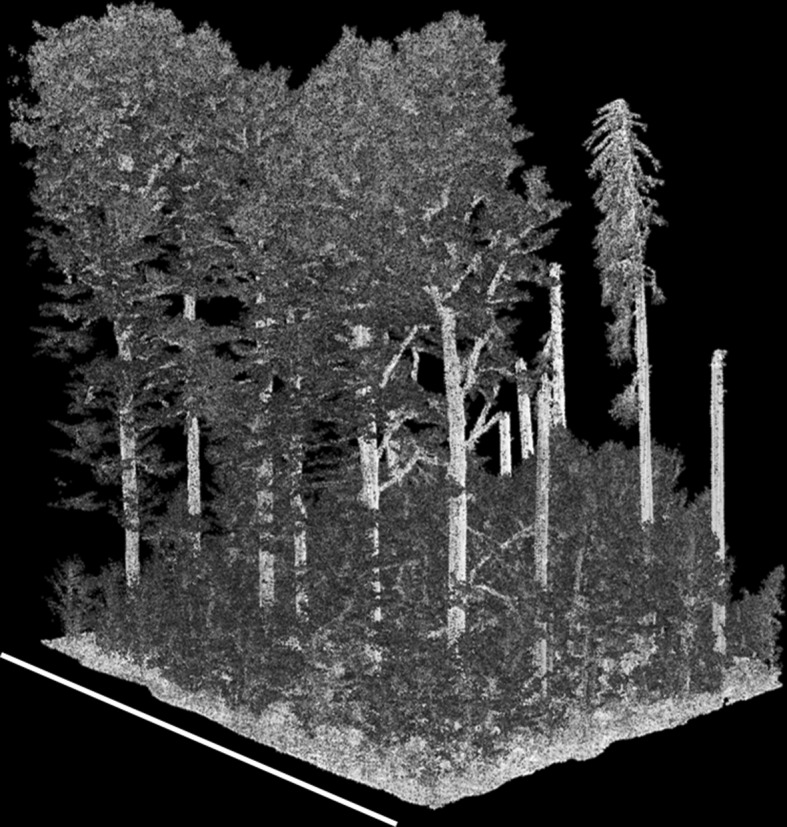
Current and planned space missions will produce aboveground biomass density data products at varying spatial resolution. Calibration and validation of these data products is critically dependent on the existence of field estimates of aboveground biomass and coincident remote sensing data from airborne or terrestrial lidar. There are few places that meet these requirements, and they are mostly in the northern hemisphere and temperate zone. Here we summarize the potential for low-altitude drones to produce new observations in support of mission science. We describe technical requirements for producing high-quality measurements from autonomous platforms and highlight differences among commercially available laser scanners and drone aircraft. We then describe a case study using a heavy-lift autonomous helicopter in a temperate mountain forest in the southern Czech Republic in support of calibration and validation activities for the NASA Global Ecosystem Dynamics Investigation. Low-altitude flight using drones enables the collection of ultra-high-density point clouds using wider laser scan angles than have been possible from traditional airborne platforms. These measurements can be precise and accurate and can achieve measurement densities of thousands of points · m. Analysis of surface elevation measurements on a heterogeneous target observed 51 days apart indicates that the realized range accuracy is 2.4 cm. The single-date precision is 2.1-4.5 cm. These estimates are net of all processing artifacts and geolocation errors under fully autonomous flight. The 3D model produced by these data can clearly resolve branch and stem structure that is comparable to terrestrial laser scans and can be acquired rapidly over large landscapes at a fraction of the cost of traditional airborne laser scanning.
当前及计划中的太空任务将生成不同空间分辨率的地上生物量密度数据产品。这些数据产品的校准和验证严重依赖于地上生物量的实地估计以及来自机载或地面激光雷达的同步遥感数据。满足这些要求的地方很少,而且大多位于北半球和温带地区。在此,我们总结了低空无人机为支持任务科学而进行新观测的潜力。我们描述了从自主平台获取高质量测量数据的技术要求,并强调了市售激光扫描仪和无人机之间的差异。然后,我们描述了一个案例研究,该研究在捷克共和国南部的温带山林中使用重型自主直升机,以支持美国国家航空航天局全球生态系统动力学调查的校准和验证活动。使用无人机进行低空飞行能够利用比传统机载平台更宽的激光扫描角度收集超高密度点云。这些测量可以精确且准确,并且可以实现数千点·米的测量密度。对间隔51天观测的异质目标上的表面高程测量分析表明,实际测距精度为2.4厘米。单日精度为2.1 - 4.5厘米。这些估计值是在完全自主飞行下扣除所有处理伪像和地理定位误差后的结果。由这些数据生成的三维模型能够清晰分辨树枝和树干结构,可与地面激光扫描相媲美,并且能够以传统机载激光扫描成本的一小部分在大片区域快速获取。