School of Electronics Engineering, Kyungpook National University, 80 Daehak-ro, Buk-gu, Daegu 41566, Korea.
Sensors (Basel). 2019 Nov 21;19(23):5084. doi: 10.3390/s19235084.
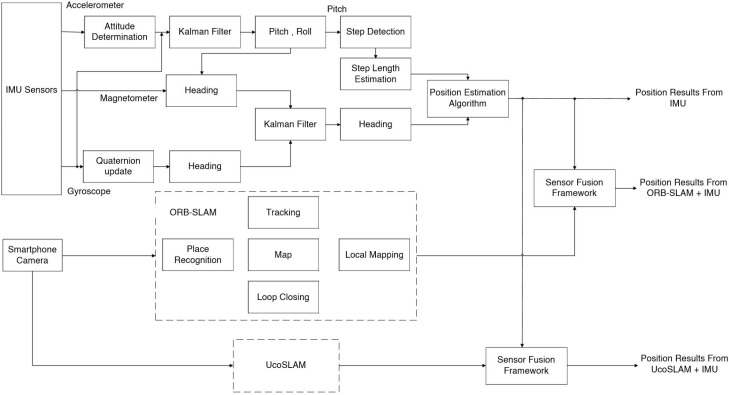
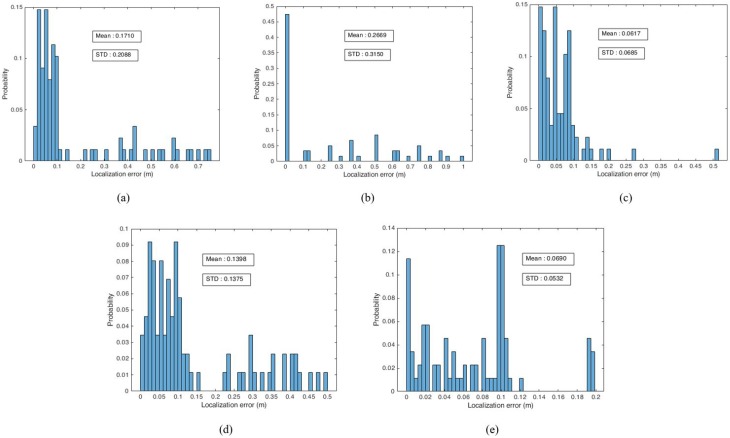
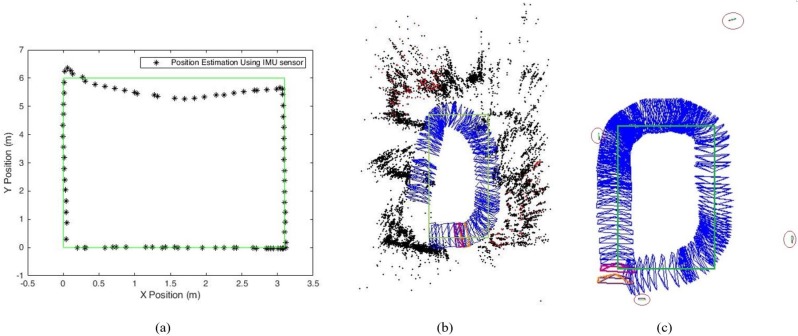
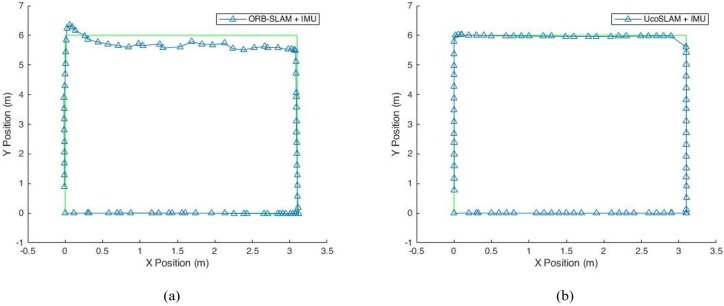
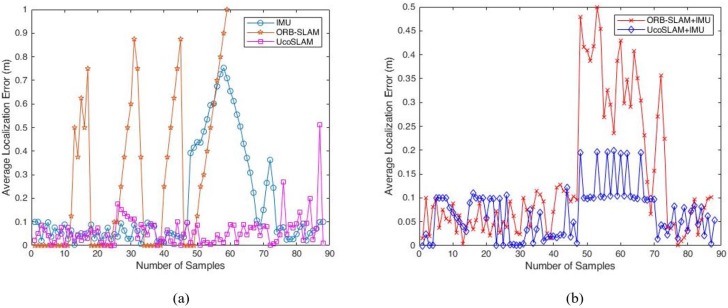
Smartphone camera or inertial measurement unit (IMU) sensor-based systems can be independently used to provide accurate indoor positioning results. However, the accuracy of an IMU-based localization system depends on the magnitude of sensor errors that are caused by external electromagnetic noise or sensor drifts. Smartphone camera based positioning systems depend on the experimental floor map and the camera poses. The challenge in smartphone camera-based localization is that accuracy depends on the rapidness of changes in the user's direction. In order to minimize the positioning errors in both the smartphone camera and IMU-based localization systems, we propose hybrid systems that combine both the camera-based and IMU sensor-based approaches for indoor localization. In this paper, an indoor experiment scenario is designed to analyse the performance of the IMU-based localization system, smartphone camera-based localization system and the proposed hybrid indoor localization system. The experiment results demonstrate the effectiveness of the proposed hybrid system and the results show that the proposed hybrid system exhibits significant position accuracy when compared to the IMU and smartphone camera-based localization systems. The performance of the proposed hybrid system is analysed in terms of average localization error and probability distributions of localization errors. The experiment results show that the proposed oriented fast rotated binary robust independent elementary features (BRIEF)-simultaneous localization and mapping (ORB-SLAM) with the IMU sensor hybrid system shows a mean localization error of 0.1398 m and the proposed simultaneous localization and mapping by fusion of keypoints and squared planar markers (UcoSLAM) with IMU sensor-based hybrid system has a 0.0690 m mean localization error and are compared with the individual localization systems in terms of mean error, maximum error, minimum error and standard deviation of error.
智能手机相机或惯性测量单元 (IMU) 传感器为基础的系统可以独立使用,提供准确的室内定位结果。然而,基于 IMU 的定位系统的精度取决于传感器误差的大小,这些误差是由外部电磁噪声或传感器漂移引起的。基于智能手机相机的定位系统依赖于实验楼层地图和相机位置。基于智能手机相机的定位的挑战在于,精度取决于用户方向变化的速度。为了最小化智能手机相机和基于 IMU 的定位系统中的定位误差,我们提出了混合系统,该系统结合了基于相机和基于 IMU 传感器的方法,用于室内定位。在本文中,设计了一个室内实验场景,以分析基于 IMU 的定位系统、基于智能手机相机的定位系统和所提出的混合室内定位系统的性能。实验结果证明了所提出的混合系统的有效性,结果表明,与基于 IMU 和智能手机相机的定位系统相比,所提出的混合系统具有显著的位置精度。从平均定位误差和定位误差概率分布两个方面对所提出的混合系统的性能进行了分析。实验结果表明,所提出的基于定向快速旋转二进制鲁棒独立基本特征 (BRIEF)-同时定位和映射 (ORB-SLAM) 与 IMU 传感器混合系统的平均定位误差为 0.1398m,所提出的基于融合关键点和平方平面标记的同时定位和映射 (UcoSLAM) 与 IMU 传感器混合系统的平均定位误差为 0.0690m,并与单独的定位系统进行了比较,包括平均误差、最大误差、最小误差和误差的标准差。