Wu Yihong, Tang Fulin, Li Heping
National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences, Beijing, China, University of Chinese Academy of Sciences, Beijing, China.
Vis Comput Ind Biomed Art. 2018 Sep 5;1(1):8. doi: 10.1186/s42492-018-0008-z.
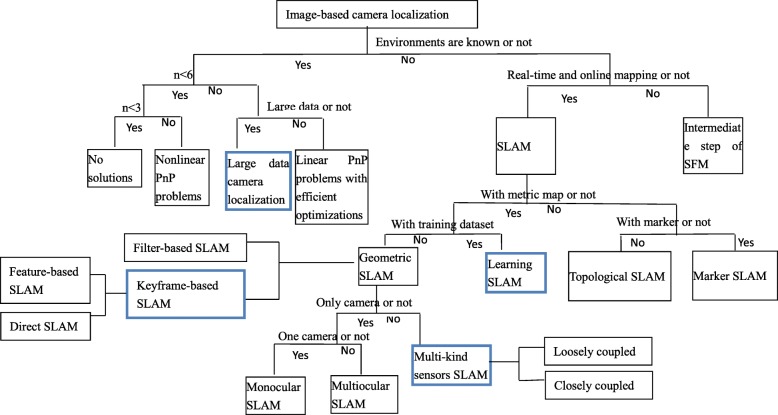
Virtual reality, augmented reality, robotics, and autonomous driving, have recently attracted much attention from both academic and industrial communities, in which image-based camera localization is a key task. However, there has not been a complete review on image-based camera localization. It is urgent to map this topic to enable individuals enter the field quickly. In this paper, an overview of image-based camera localization is presented. A new and complete classification of image-based camera localization approaches is provided and the related techniques are introduced. Trends for future development are also discussed. This will be useful not only to researchers, but also to engineers and other individuals interested in this field.
虚拟现实、增强现实、机器人技术和自动驾驶最近引起了学术界和工业界的广泛关注,其中基于图像的相机定位是一项关键任务。然而,目前还没有对基于图像的相机定位进行全面的综述。迫切需要梳理这个主题,以便让人们能够快速进入该领域。本文对基于图像的相机定位进行了概述。提供了一种新的、完整的基于图像的相机定位方法分类,并介绍了相关技术。还讨论了未来的发展趋势。这不仅对研究人员有用,对工程师和该领域的其他感兴趣的人也有用。