Kozaki Shingo, Moritoki Yukihito, Furukawa Taichi, Akieda Hikaru, Kageyama Tatsuto, Fukuda Junji, Maruo Shoji
Graduate school of Engineering Science, Yokohama National University, 79-5 Tokiwadai, Hodogaya, Yokohama 240-8501, Japan.
College of Engineering Science, Yokohama National University, 79-5 Tokiwadai, Hodogaya, Yokohama 240-8501, Japan.
Micromachines (Basel). 2020 Feb 7;11(2):174. doi: 10.3390/mi11020174.
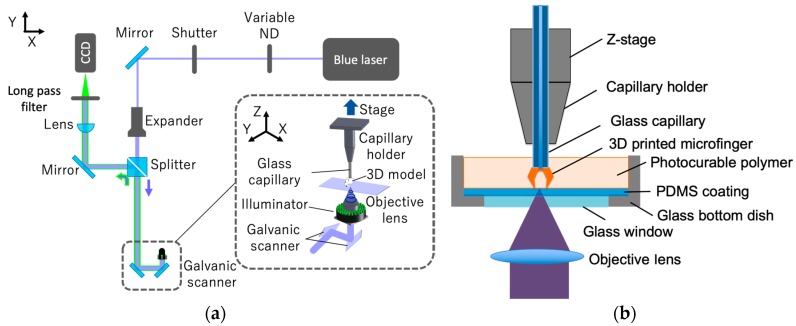
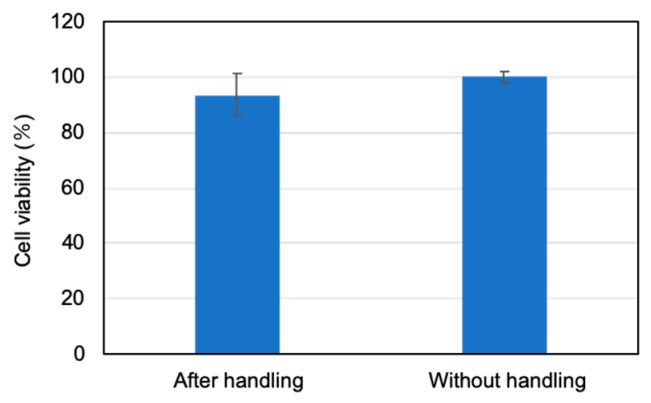
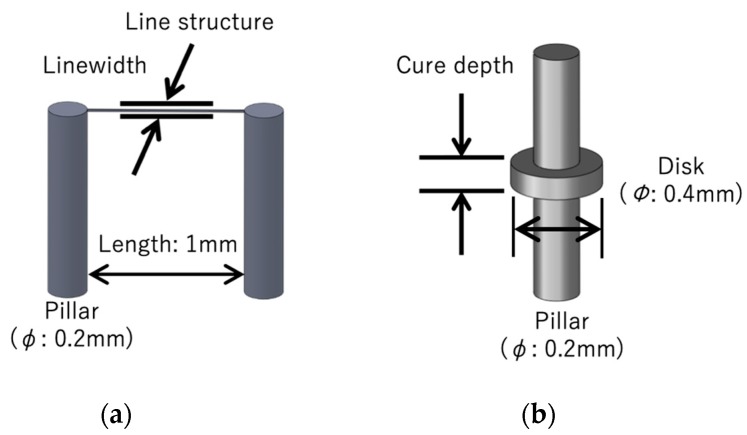
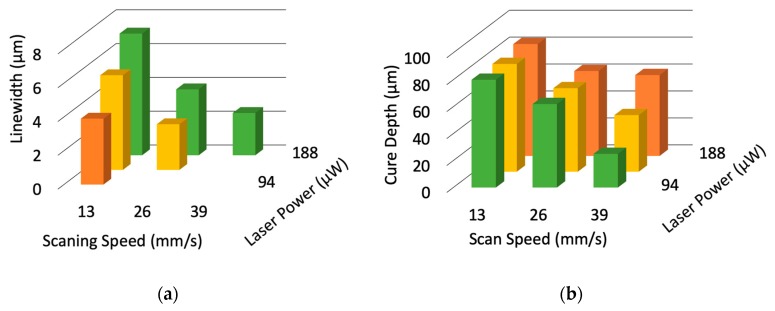
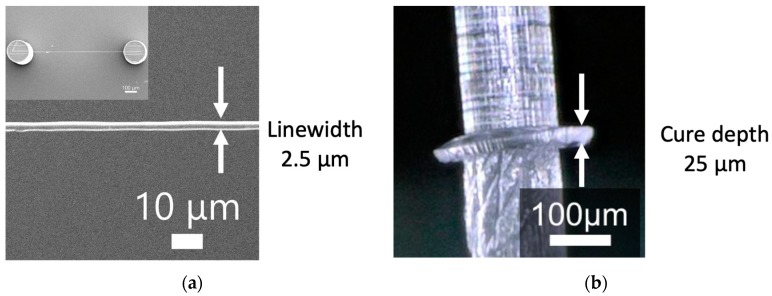
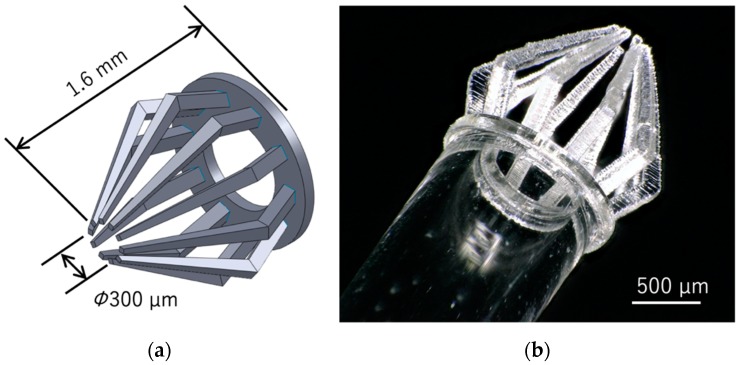
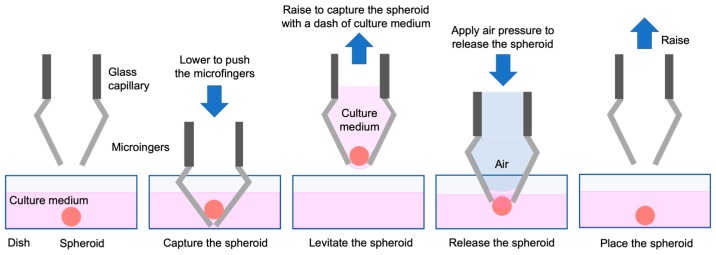
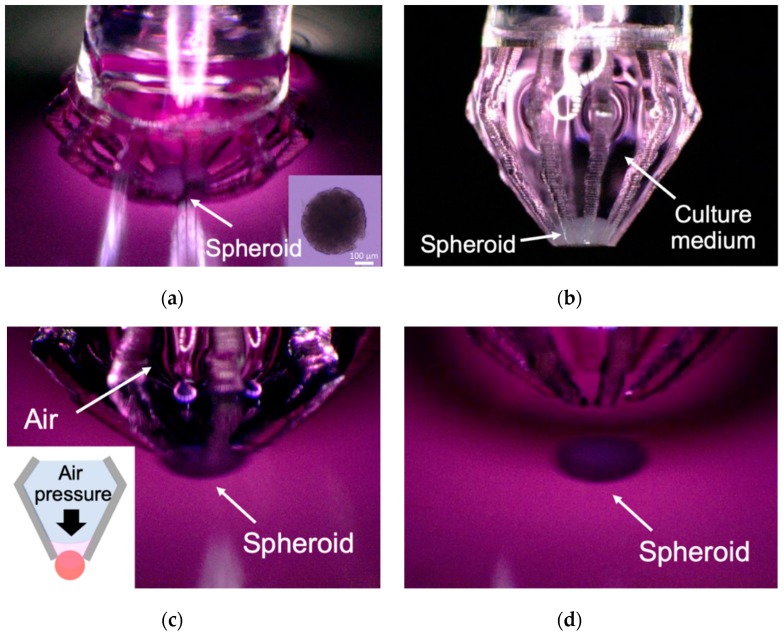
In this study, a three-dimensional (3D) micromanipulator mounted on a glass capillary is developed for handling biological samples, such as multicellular spheroids and embryos. To fabricate the micromanipulator, we developed an additive manufacturing system based on high-resolution microstereolithography using a 405-nm blue laser. The fabrication system makes it possible to fabricate 3D microstructures on a glass capillary with 2.5 µm lateral resolution and 25 µm layer thickness. We also demonstrated the capture and release of a spheroid with the micromanipulator fabricated using our additive manufacturing system. We showed that spheroids can be easily handled by a simple operation with minimal damage using a cage-like multiple finger structure. Additive manufacturing of tailor-made micromanipulators mounted on a glass capillary will be useful in biological and tissue engineering research.
在本研究中,开发了一种安装在玻璃毛细管上的三维(3D)微操纵器,用于处理生物样本,如多细胞球体和胚胎。为了制造该微操纵器,我们基于使用405纳米蓝光激光的高分辨率微立体光刻技术开发了一种增材制造系统。该制造系统能够在玻璃毛细管上制造具有2.5微米横向分辨率和25微米层厚的3D微结构。我们还展示了使用我们的增材制造系统制造的微操纵器对球体的捕获和释放。我们表明,使用笼状多指结构通过简单操作就能轻松处理球体,且损伤最小。安装在玻璃毛细管上的定制微操纵器的增材制造将在生物和组织工程研究中发挥作用。