Department of Electrical, Electronics, and Communication Engineering Education, Chungnam National University, Daejeon, 34134, Republic of Korea.
Department of Convergence System Engineering, Chungnam National University, Daejeon, 34134, Republic of Korea.
Sci Rep. 2020 Feb 12;10(1):2482. doi: 10.1038/s41598-020-59318-3.
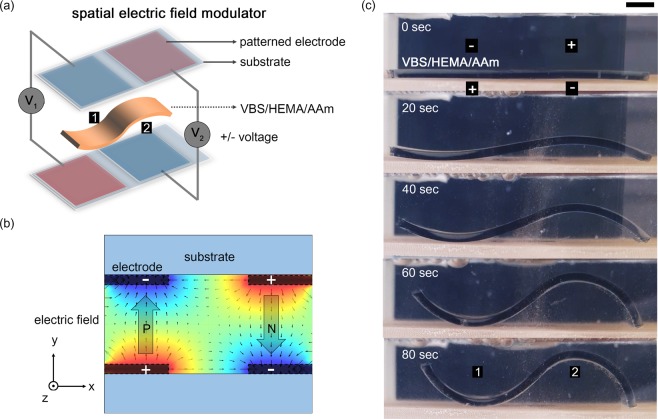
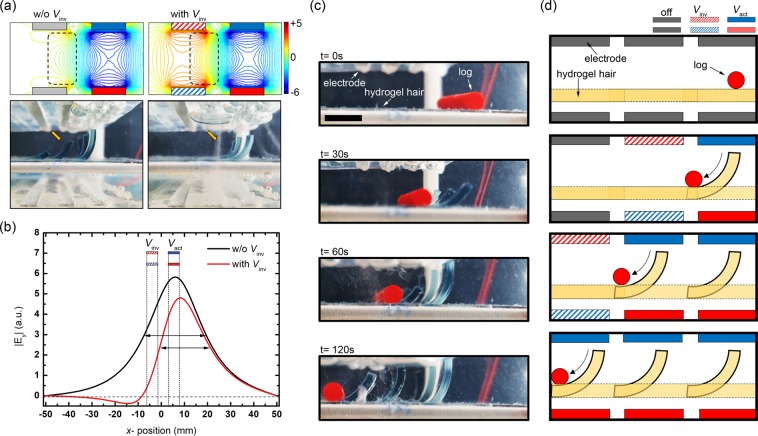
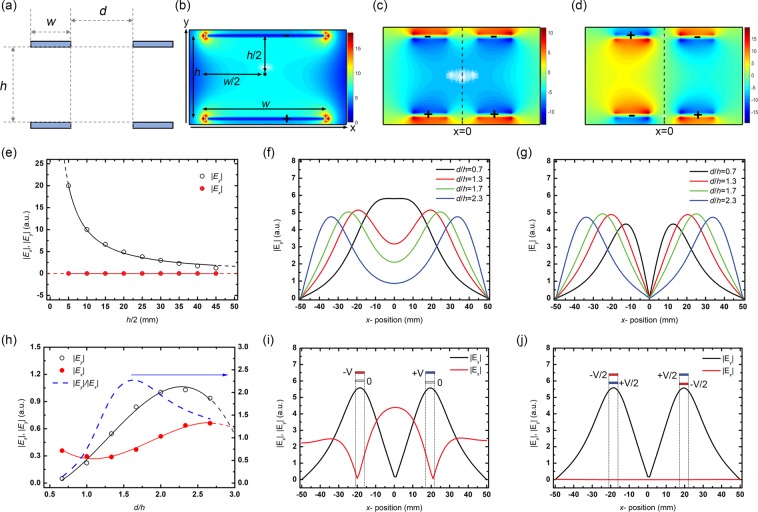
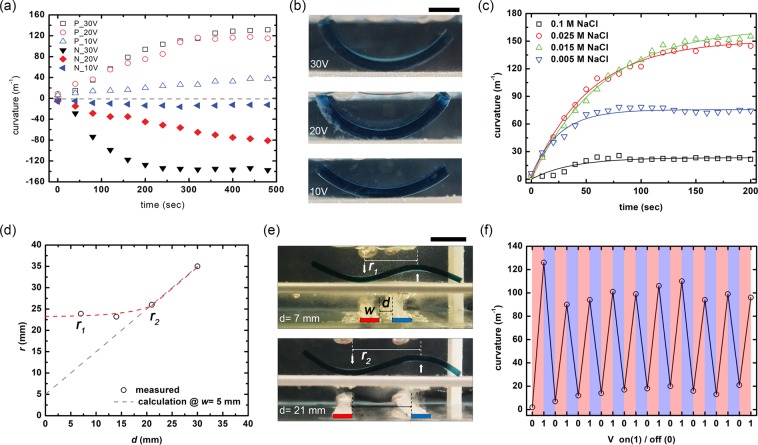
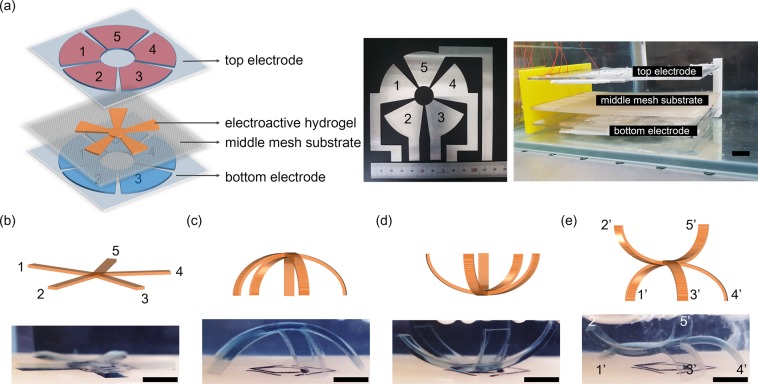
Electroactive hydrogels that exhibit large deformation in response to an electric field have received significant attention as a potential actuating material for soft actuators and artificial muscle. However, their mechanical actuation has been limited in simple bending or folding due to uniform electric field modulation. To implement complex movements, a pre-program, such as a hinge and a multilayer pattern, is usually required for the actuator in advance. Here, we propose a reprogrammable actuating method and sophisticated manipulation by using multipolar three-dimensional electric field modulation without pre-program. Through the multipolar spatial electric field modulator, which controls the polarity/intensity of the electric field in three-dimensions, complex three-dimensional (3D) actuation of single hydrogels are achieved. Also, air bubbles generated during operation in the conventional horizontal configuration are not an issue in the proposed new vertical configuration. We demonstrate soft robotic actuators, including basic bending mechanics in terms of controllability and reliability, and several 3D shapes having positive and negative curvature can easily be achieved in a single sheet, paving the way for continuously reconfigurable materials.
对电场响应产生大变形的电活性水凝胶作为软致动器和人造肌肉的潜在致动材料受到了极大关注。然而,由于均匀电场调制,其机械致动仅限于简单的弯曲或折叠。为了实现复杂的运动,通常需要预先为致动器设计预编程,例如铰链和多层图案。在这里,我们提出了一种无需预编程即可使用多极三维电场调制进行可编程致动和复杂操作的方法。通过控制三维电场极性/强度的多极空间电场调制器,实现了单个水凝胶的复杂三维(3D)致动。此外,在传统水平配置中操作过程中产生的气泡在新的垂直配置中不是问题。我们展示了软机器人致动器,包括可控性和可靠性方面的基本弯曲力学,并且可以很容易地在单个薄片上实现具有正曲率和负曲率的几个 3D 形状,为可连续重构的材料铺平了道路。