Sheng Yinxiangzi, Sun Jiayao, Wang Weiwei, Stuart Brian, Kong Lin, Gao Jing, You Dan, Wu Xiaodong
Department of Medical Physics, Shanghai Proton and Heavy Ion Center, Shanghai, China.
Shanghai Engineering Research Center of Proton and Heavy Ion Radiation Therapy, Shanghai, China.
Front Oncol. 2020 Feb 11;10:122. doi: 10.3389/fonc.2020.00122. eCollection 2020.
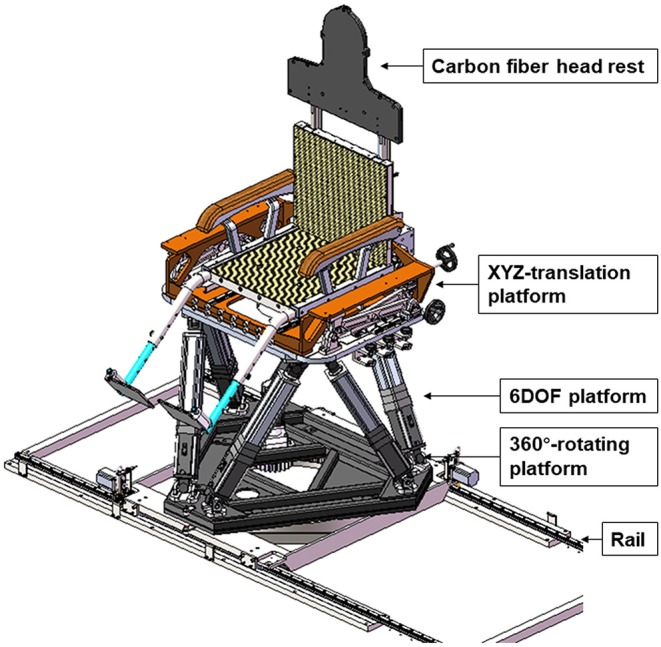
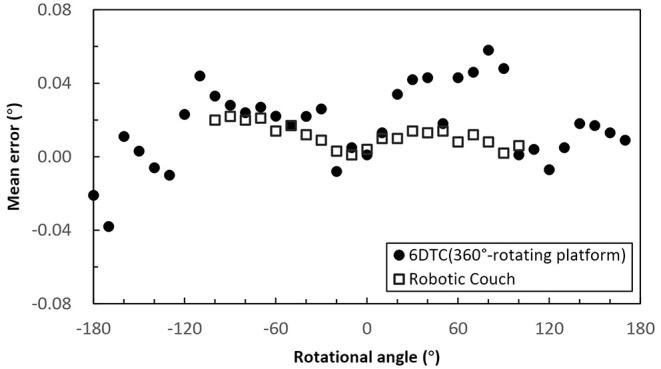
To evaluate the mechanical accuracy and the robustness of position alignment under x-ray-based image guidance of a treatment chair with six degrees of freedom (6DTC) which was developed for patient treatment in an upright posture at fixed horizontal beam lines in particle (proton, carbon ion, or others) radiotherapy facilities. The positional accuracy including translational and axial rotational accuracy of the 6DTC was evaluated by using a Vicon Motion Capture System (VMCS). Stability of the chair rotation isocenter was determined by a CCD camera with an in-house developed software. The tests were carried out to examine two key motion components of the 6DTC: a floor/rail-mount 360°-rotating platform and a 6-degree-of-freedom (6DOF) platform. The measurement results were compared to that of a commercial clinical robot couch. The accuracy of position alignment, simulating the actual clinical protocol, through an Image-guided Radiation Therapy (IGRT) system was studied at the pre-treatment position and beam specific treatment position. The translational accuracy was 0.12 mm (SD 0.07 mm) for the 6DOF platform. The rotational accuracy was 0.04° (SD 0.03°) and 0.02° (SD 0.02°) for the 6DOF platform and the 360° -rotating platform, respectively. The displacement between the chair rotation center and the room isocenter center was no more than 0.18 mm in all three rotational axes. Combined with an x-ray-based IGRT system, the treatment alignment test with a rigid phantom yielded a total positional accuracy of 0.23 mm (SD 0.17 mm) and 0.14° (SD 0.14°) at treatment position. On the basis of the rigid phantom study, the 6DTC showed comparable accuracy to the robot treatment couch. Combining with the IGRT, the 6DTC can provide position alignment with submillimeter accuracy for rigid phantom in upright posture.
为评估一款六自由度治疗椅(6DTC)在基于X射线的图像引导下的机械精度和位置对准的稳健性,该治疗椅是为在粒子(质子、碳离子或其他)放射治疗设施的固定水平束线处以直立姿势进行患者治疗而开发的。使用Vicon运动捕捉系统(VMCS)评估6DTC的位置精度,包括平移和轴向旋转精度。通过一台配备内部开发软件的CCD相机确定治疗椅旋转等中心的稳定性。进行测试以检查6DTC的两个关键运动部件:一个地面/轨道安装的360°旋转平台和一个六自由度(6DOF)平台。将测量结果与商用临床机器人治疗床的结果进行比较。通过图像引导放射治疗(IGRT)系统,在治疗前位置和束线特定治疗位置模拟实际临床方案,研究位置对准的精度。6DOF平台的平移精度为0.12毫米(标准差0.07毫米)。6DOF平台和360°旋转平台的旋转精度分别为0.04°(标准差0.03°)和0.02°(标准差0.02°)。在所有三个旋转轴上,治疗椅旋转中心与房间等中心之间的位移不超过0.18毫米。结合基于X射线的IGRT系统,使用刚性体模进行的治疗对准测试在治疗位置产生的总位置精度为0.23毫米(标准差0.17毫米)和0.14°(标准差0.14°)。基于刚性体模研究,6DTC显示出与机器人治疗床相当的精度。结合IGRT,6DTC可为直立姿势的刚性体模提供亚毫米精度的位置对准。