Sun Ho Cheung Michael, Liao Pan, Wei Tanyong, Zhang Li, Sun Dong
King George V School, Hong Kong 999077, China.
Department of Biomedical Engineering, City University of Hong Kong, Hong Kong 999077, China.
Micromachines (Basel). 2020 Apr 13;11(4):404. doi: 10.3390/mi11040404.
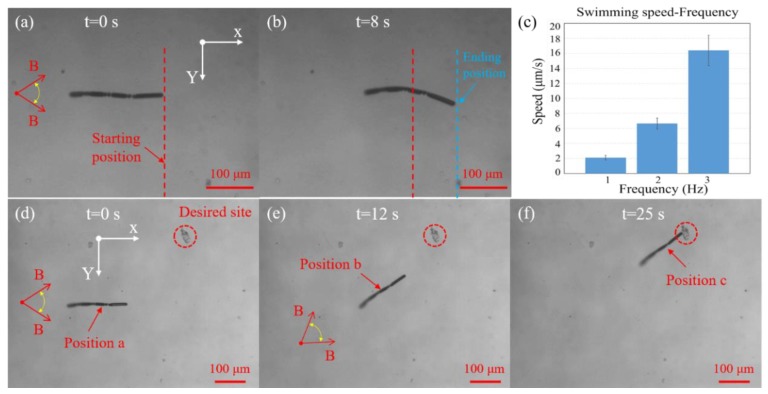
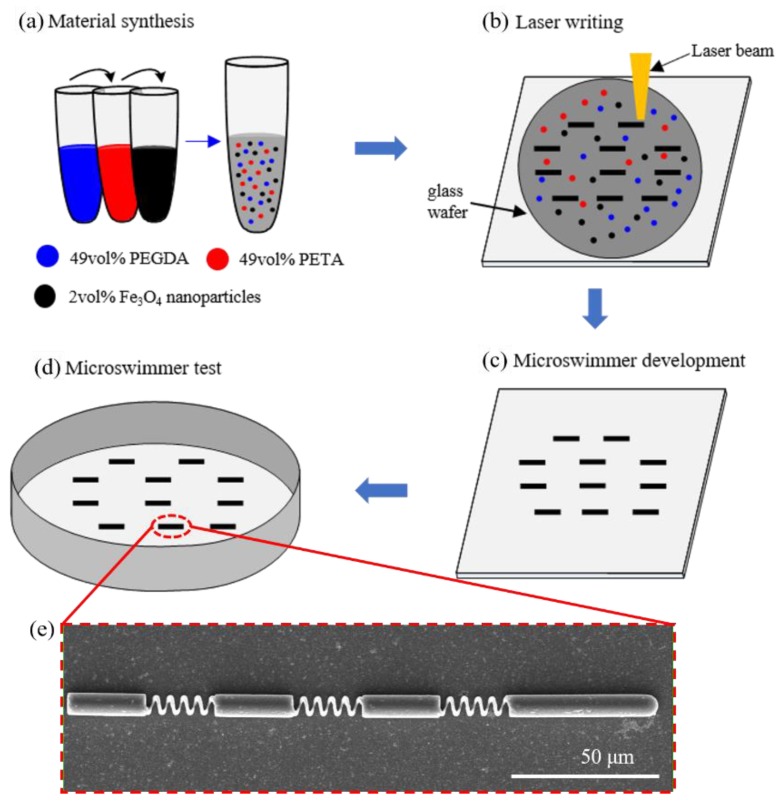
The propulsive efficiency and biodegradability of wireless microrobots play a significant role in facilitating promising biomedical applications. Mimicking biological matters is a promising way to improve the performance of microrobots. Among diverse locomotion strategies, undulatory propulsion shows remarkable efficiency and agility. This work proposes a novel magnetically powered and hydrogel-based biodegradable microswimmer. The microswimmer is fabricated integrally by 3D laser lithography based on two-photon polymerization from a biodegradable material and has a total length of 200 μm and a diameter of 8 μm. The designed microswimmer incorporates a novel design utilizing four rigid segments, each of which is connected to the succeeding segment by spring to achieve undulation, improving structural integrity as well as simplifying the fabrication process. Under an external oscillating magnetic field, the microswimmer with multiple rigid segments connected by flexible spring can achieve undulatory locomotion and move forward along with the directions guided by the external magnetic field in the low Reynolds number (Re) regime. In addition, experiments demonstrated that the microswimmer can be degraded successfully, which allows it to be safely applied in real-time in vivo environments. This design has great potential in future in vivo applications such as precision medicine, drug delivery, and diagnosis.
无线微型机器人的推进效率和生物降解性在推动有前景的生物医学应用中发挥着重要作用。模仿生物物质是提高微型机器人性能的一种有前途的方法。在各种运动策略中,波动推进显示出显著的效率和敏捷性。这项工作提出了一种新型的基于水凝胶的可生物降解磁驱动微型游泳器。该微型游泳器由可生物降解材料通过基于双光子聚合的3D激光光刻一体制造而成,总长度为200μm,直径为8μm。所设计的微型游泳器采用了一种新颖的设计,利用四个刚性段,每个刚性段通过弹簧与后续段相连以实现波动,提高了结构完整性并简化了制造过程。在外部振荡磁场作用下,由柔性弹簧连接多个刚性段的微型游泳器能够在低雷诺数(Re)状态下实现波动运动,并沿着外部磁场引导的方向向前移动。此外,实验表明该微型游泳器能够成功降解,这使其能够安全地实时应用于体内环境。这种设计在未来的体内应用如精准医学、药物递送和诊断等方面具有巨大潜力。