Jonsen Ian D, Patterson Toby A, Costa Daniel P, Doherty Philip D, Godley Brendan J, Grecian W James, Guinet Christophe, Hoenner Xavier, Kienle Sarah S, Robinson Patrick W, Votier Stephen C, Whiting Scott, Witt Matthew J, Hindell Mark A, Harcourt Robert G, McMahon Clive R
Dept of Biological Sciences, Macquarie University, Sydney, Australia.
CSIRO Oceans and Atmosphere, Hobart, Australia.
Mov Ecol. 2020 Jul 17;8:31. doi: 10.1186/s40462-020-00217-7. eCollection 2020.
State-space models are important tools for quality control and analysis of error-prone animal movement data. The near real-time (within 24 h) capability of the Argos satellite system can aid dynamic ocean management of human activities by informing when animals enter wind farms, shipping lanes, and other intensive use zones. This capability also facilitates the use of ocean observations from animal-borne sensors in operational ocean forecasting models. Such near real-time data provision requires rapid, reliable quality control to deal with error-prone Argos locations.
We formulate a continuous-time state-space model to filter the three types of Argos location data (Least-Squares, Kalman filter, and Kalman smoother), accounting for irregular timing of observations. Our model is deliberately simple to ensure speed and reliability for automated, near real-time quality control of Argos location data. We validate the model by fitting to Argos locations collected from 61 individuals across 7 marine vertebrates and compare model-estimated locations to contemporaneous GPS locations. We then test assumptions that Argos Kalman filter/smoother error ellipses are unbiased, and that Argos Kalman smoother location accuracy cannot be improved by subsequent state-space modelling.
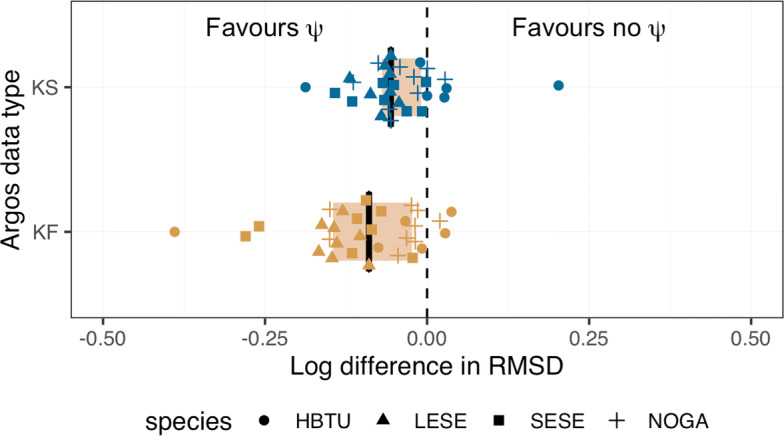
Estimation accuracy varied among species with Root Mean Squared Errors usually <5 km and these decreased with increasing data sampling rate and precision of Argos locations. Including a model parameter to inflate Argos error ellipse sizes in the north - south direction resulted in more accurate location estimates. Finally, in some cases the model appreciably improved the accuracy of the Argos Kalman smoother locations, which should not be possible if the smoother is using all available information.
Our model provides quality-controlled locations from Argos Least-Squares or Kalman filter data with accuracy similar to or marginally better than Argos Kalman smoother data that are only available via fee-based reprocessing. Simplicity and ease of use make the model suitable both for automated quality control of near real-time Argos data and for manual use by researchers working with historical Argos data.
状态空间模型是用于对易出错的动物运动数据进行质量控制和分析的重要工具。阿戈斯卫星系统的近实时(24小时内)能力可通过告知动物何时进入风电场、航道及其他高强度利用区域,辅助人类活动的动态海洋管理。此能力还便于在业务海洋预报模型中使用来自动物搭载传感器的海洋观测数据。这种近实时数据提供需要快速、可靠的质量控制来处理易出错的阿戈斯定位数据。
我们构建了一个连续时间状态空间模型,用于对三种类型的阿戈斯定位数据(最小二乘法、卡尔曼滤波器和卡尔曼平滑器)进行滤波,同时考虑观测时间的不规则性。我们的模型特意设计得很简单,以确保对阿戈斯定位数据进行自动化近实时质量控制时的速度和可靠性。我们通过拟合从7种海洋脊椎动物的61个个体收集的阿戈斯定位数据来验证该模型,并将模型估计的位置与同期的GPS位置进行比较。然后,我们检验阿戈斯卡尔曼滤波器/平滑器误差椭圆无偏以及后续状态空间建模无法提高阿戈斯卡尔曼平滑器定位精度的假设。
不同物种的估计精度有所不同,均方根误差通常<5公里,且随着数据采样率的提高和阿戈斯定位精度的增加而降低。纳入一个使阿戈斯误差椭圆大小在南北方向上增大的模型参数,可得到更准确的位置估计。最后,在某些情况下,该模型显著提高了阿戈斯卡尔曼平滑器位置的精度,而如果平滑器使用了所有可用信息,这是不可能实现的。
我们的模型从阿戈斯最小二乘法或卡尔曼滤波器数据中提供经过质量控制的位置,其精度与仅通过付费后处理才能获得的阿戈斯卡尔曼平滑器数据相似或略高。该模型的简单性和易用性使其既适用于对近实时阿戈斯数据进行自动化质量控制,也适用于处理历史阿戈斯数据的研究人员手动使用。