Gomez-Vargas Daniel, Ballen-Moreno Felipe, Barria Patricio, Aguilar Rolando, Azorín José M, Munera Marcela, Cifuentes Carlos A
Department of Biomedical Engineering, Colombian School of Engineering Julio Garavito, Bogotá 111166, Colombia.
Department of Electrical Engineering, University of Magallanes, Punta Arenas 6210427, Chile.
Brain Sci. 2021 Mar 24;11(4):412. doi: 10.3390/brainsci11040412.
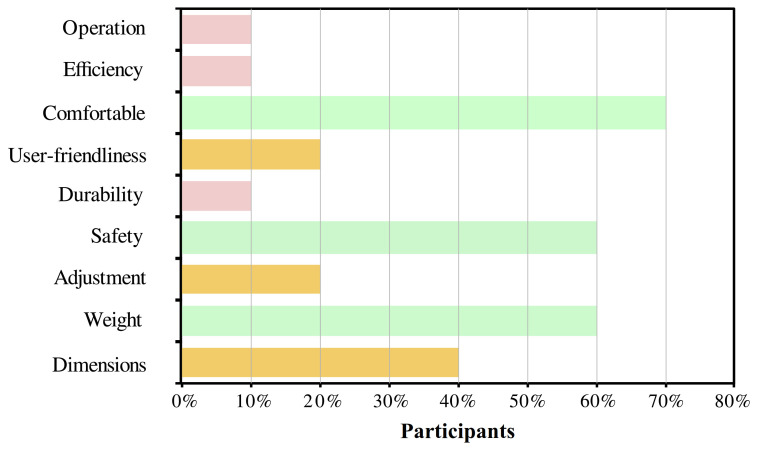
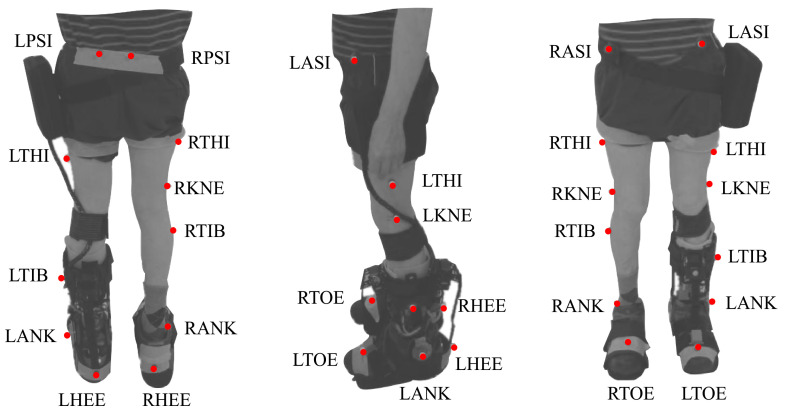
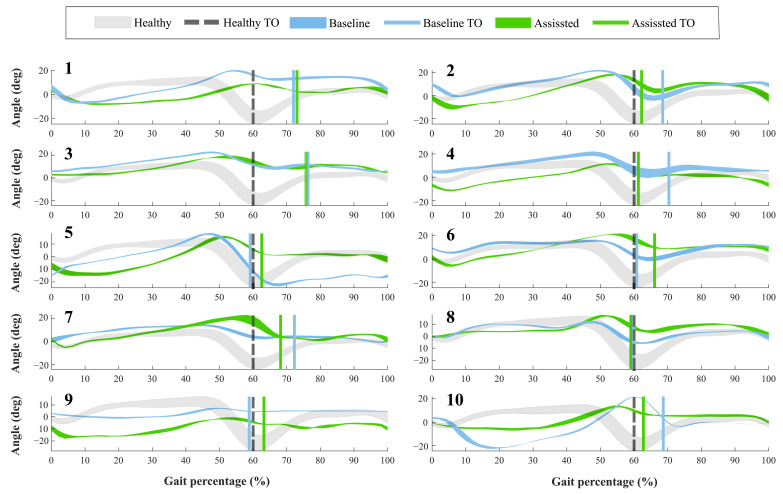
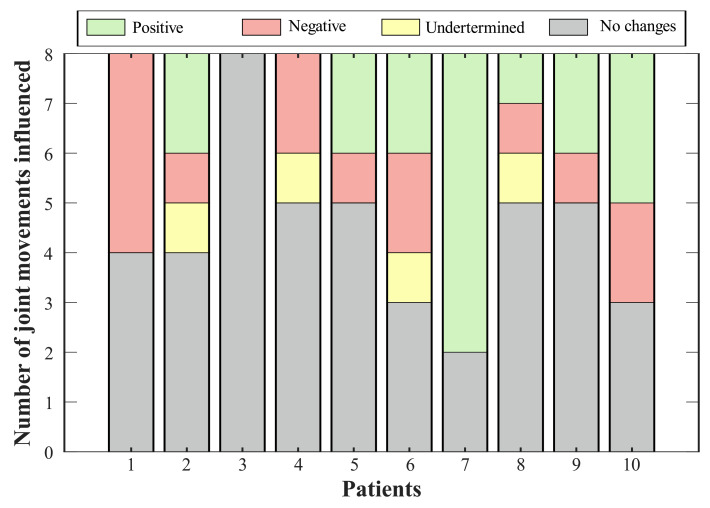
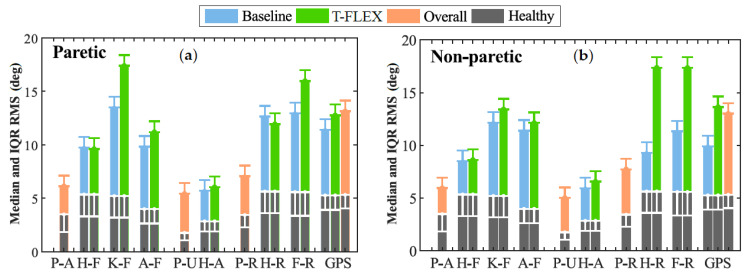
Robotic devices can provide physical assistance to people who have suffered neurological impairments such as stroke. Neurological disorders related to this condition induce abnormal gait patterns, which impede the independence to execute different Activities of Daily Living (ADLs). From the fundamental role of the ankle in walking, Powered Ankle-Foot Orthoses (PAFOs) have been developed to enhance the users' gait patterns, and hence their quality of life. Ten patients who suffered a stroke used the actuation system of the T-FLEX exoskeleton triggered by an inertial sensor on the foot tip. The VICONmotion capture system recorded the users' kinematics for unassisted and assisted gait modalities. Biomechanical analysis and usability assessment measured the performance of the system actuation for the participants in overground walking. The biomechanical assessment exhibited changes in the lower joints' range of motion for 70% of the subjects. Moreover, the ankle kinematics showed a correlation with the variation of other movements analyzed. This variation had positive effects on 70% of the participants in at least one joint. The Gait Deviation Index (GDI) presented significant changes for 30% of the paretic limbs and 40% of the non-paretic, where the tendency was to decrease. The spatiotemporal parameters did not show significant variations between modalities, although users' cadence had a decrease of 70% of the volunteers. Lastly, the satisfaction with the device was positive, the comfort being the most user-selected aspect. This article presents the assessment of the T-FLEX actuation system in people who suffered a stroke. Biomechanical results show improvement in the ankle kinematics and variations in the other joints. In general terms, GDI does not exhibit significant increases, and the Movement Analysis Profile (MAP) registers alterations for the assisted gait with the device. Future works should focus on assessing the full T-FLEX orthosis in a larger sample of patients, including a stage of training.
机器人设备可以为中风等患有神经功能障碍的人提供身体辅助。与这种情况相关的神经疾病会导致异常的步态模式,这会妨碍人们独立进行不同的日常生活活动(ADL)。基于脚踝在行走中的基本作用,动力脚踝足矫形器(PAFO)已被开发出来,以改善使用者的步态模式,从而提高他们的生活质量。10名中风患者使用了由脚尖上的惯性传感器触发的T-FLEX外骨骼驱动系统。VICON运动捕捉系统记录了使用者在无辅助和辅助步态模式下的运动学数据。生物力学分析和可用性评估测量了系统驱动在地面行走中对参与者的性能。生物力学评估显示,70%的受试者下肢关节活动范围发生了变化。此外,脚踝运动学与所分析的其他运动变化存在相关性。这种变化对至少一个关节中70%的参与者产生了积极影响。步态偏差指数(GDI)在30%的患侧肢体和40%的健侧肢体上呈现出显著变化,且有下降趋势。时空参数在不同模式之间没有显示出显著差异,尽管70%的志愿者步频有所下降。最后,对该设备的满意度是积极的,舒适性是用户选择最多的方面。本文介绍了对中风患者的T-FLEX驱动系统的评估。生物力学结果表明脚踝运动学有所改善,其他关节也有变化。总体而言,GDI没有显著增加,运动分析概况(MAP)记录了使用该设备辅助步态时的变化。未来的工作应集中在对更大样本的患者进行完整的T-FLEX矫形器评估,包括一个训练阶段。