School of Informatics, University of Skövde, Box 408, 541 28 Skövde, Sweden.
Sensors (Basel). 2020 Jul 31;20(15):4284. doi: 10.3390/s20154284.
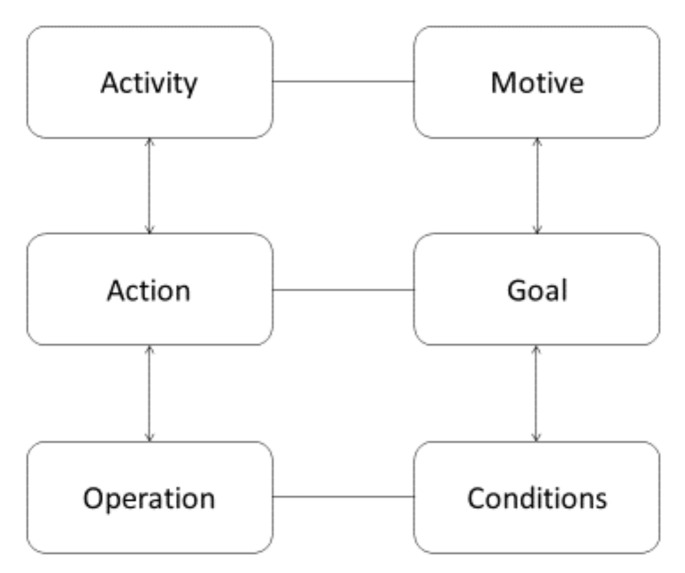
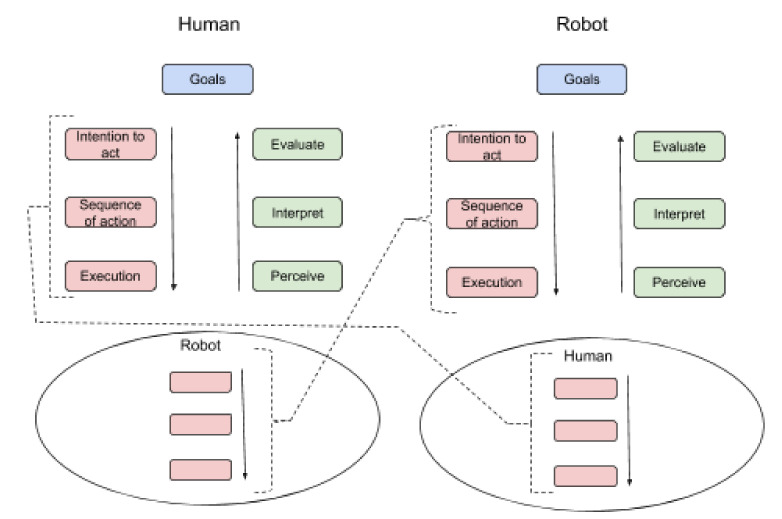
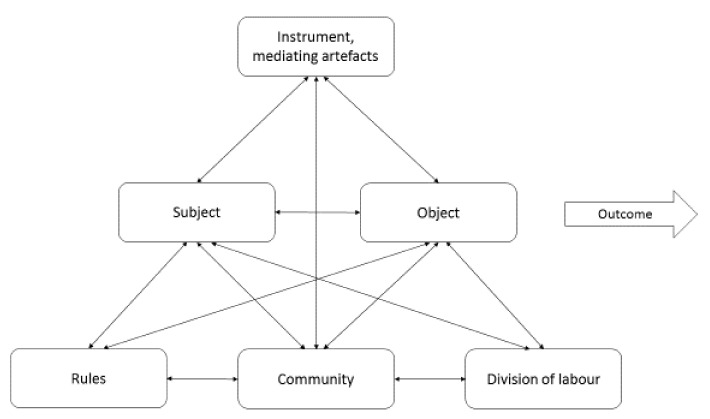
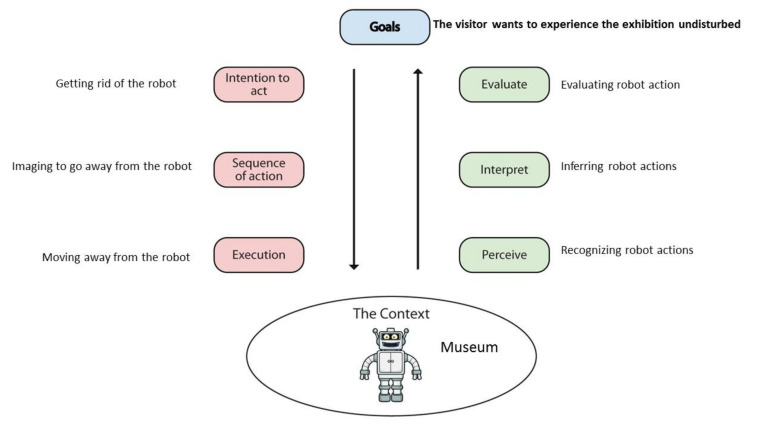
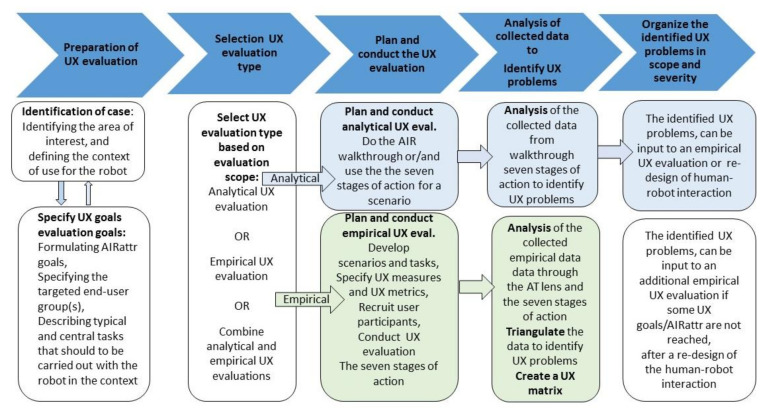
The coexistence of robots and humans in shared physical and social spaces is expected to increase. A key enabler of high-quality interaction is a mutual understanding of each other's actions and intentions. In this paper, we motivate and present a systematic user experience (UX) evaluation framework of action and intention recognition between humans and robots from a UX perspective, because there is an identified lack of this kind of evaluation methodology. The evaluation framework is packaged into a methodological approach called ANEMONE (action and intention recognition in human robot interaction). ANEMONE has its foundation in cultural-historical activity theory (AT) as the theoretical lens, the seven stages of action model, and user experience (UX) evaluation methodology, which together are useful in motivating and framing the work presented in this paper. The proposed methodological approach of ANEMONE provides guidance on how to measure, assess, and evaluate the mutual recognition of actions and intentions between humans and robots for investigators of UX evaluation. The paper ends with a discussion, addresses future work, and some concluding remarks.
机器人和人类在共享物理和社会空间中共同存在的情况预计将会增加。高质量交互的关键促成因素是彼此对对方行为和意图的相互理解。在本文中,我们从用户体验 (UX) 的角度出发,提出并论证了一种用于人类与机器人之间行为和意图识别的系统 UX 评估框架,因为目前缺少这种评估方法。该评估框架被打包成一种名为“ANEMONE(人机交互中的动作和意图识别)”的方法。ANEMONE 的基础是文化历史活动理论 (AT),作为理论视角,以及动作模型的七个阶段和用户体验 (UX) 评估方法,这些共同有助于激发和构建本文中的工作。所提出的 ANEMONE 方法提供了关于如何衡量、评估和评估人类与机器人之间动作和意图相互识别的指导,以供 UX 评估的研究人员使用。本文最后进行了讨论,提出了未来的工作,并作了一些总结。