Weber Bernhard, Panzirsch Michael, Stulp Freek, Schneider Stefan
German Aerospace Center, Institute of Robotics and Mechatronics, Oberpfaffenhofen, Germany.
Institute of Movement and Neurosciences, German Sport University, Cologne, Germany.
Exp Brain Res. 2020 Oct;238(10):2373-2384. doi: 10.1007/s00221-020-05898-5. Epub 2020 Aug 7.
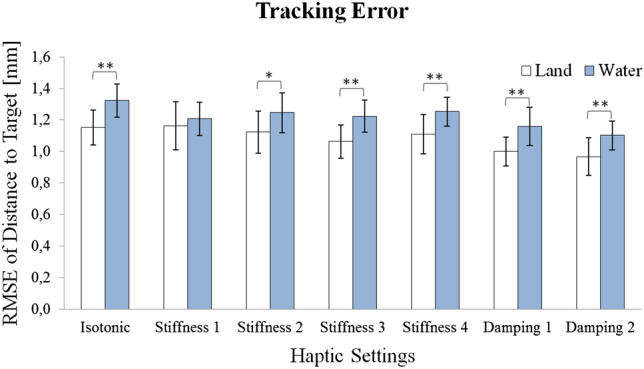
The success of many space missions critically depends on human capabilities and performance. Yet, it is known that sensorimotor performance is degraded under conditions of weightlessness. Therefore, astronauts prepare for their missions in simulated weightlessness under water. In the present study, we investigated sensorimotor performance in simulated weightlessness (induced by shallow water immersion) and whether performance can be improved by choosing appropriate haptic settings of the human-machine interface (e.g., motion damping). Twenty-two participants performed basic aiming and tracking tasks with a force feedback joystick under water and on land and with different haptic settings of the joystick (no haptics, three spring stiffnesses, and two motion dampings). While higher resistive forces should be avoided for rapid aiming tasks in simulated weightlessness, tracking performance is best with higher motions damping in both land and water setups, although the performance losses due to water immersion cannot be compensated. The overall result pattern also provides insights into the causal mechanism behind the slowing effect during aiming motions and decreased accuracy of tracking motions in simulated weightlessness. Findings provide evidence that distorted proprioception due to altered muscle spindle activity seemingly is the main trigger of impaired sensorimotor performance in simulated weightlessness.
许多太空任务的成功严重依赖于人类的能力和表现。然而,众所周知,在失重条件下感觉运动表现会下降。因此,宇航员在水下模拟失重环境中为任务做准备。在本研究中,我们调查了模拟失重(由浅水浸没引起)下的感觉运动表现,以及通过选择人机界面的适当触觉设置(例如运动阻尼)是否可以提高表现。22名参与者在水下和陆地上使用力反馈操纵杆执行基本的瞄准和跟踪任务,并使用操纵杆的不同触觉设置(无触觉、三种弹簧刚度和两种运动阻尼)。虽然在模拟失重环境中进行快速瞄准任务时应避免较高的阻力,但在陆地和水下设置中,跟踪性能在较高运动阻尼时最佳,尽管由于水浸导致的性能损失无法得到补偿。总体结果模式也为模拟失重环境中瞄准运动时的减速效应和跟踪运动准确性下降背后的因果机制提供了见解。研究结果提供了证据,表明由于肌肉纺锤体活动改变导致的本体感觉扭曲似乎是模拟失重环境中感觉运动表现受损的主要触发因素。