State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China.
School of Mechanical and Aerospace Engineering, Jilin University, Changchun 130022, China.
Sensors (Basel). 2020 Aug 18;20(16):4646. doi: 10.3390/s20164646.
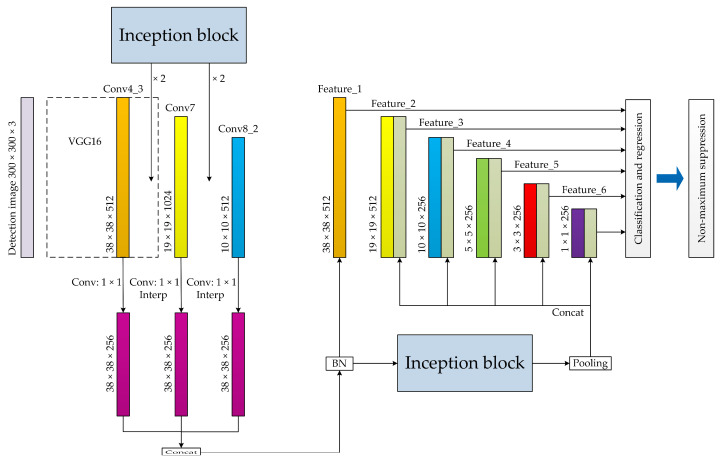
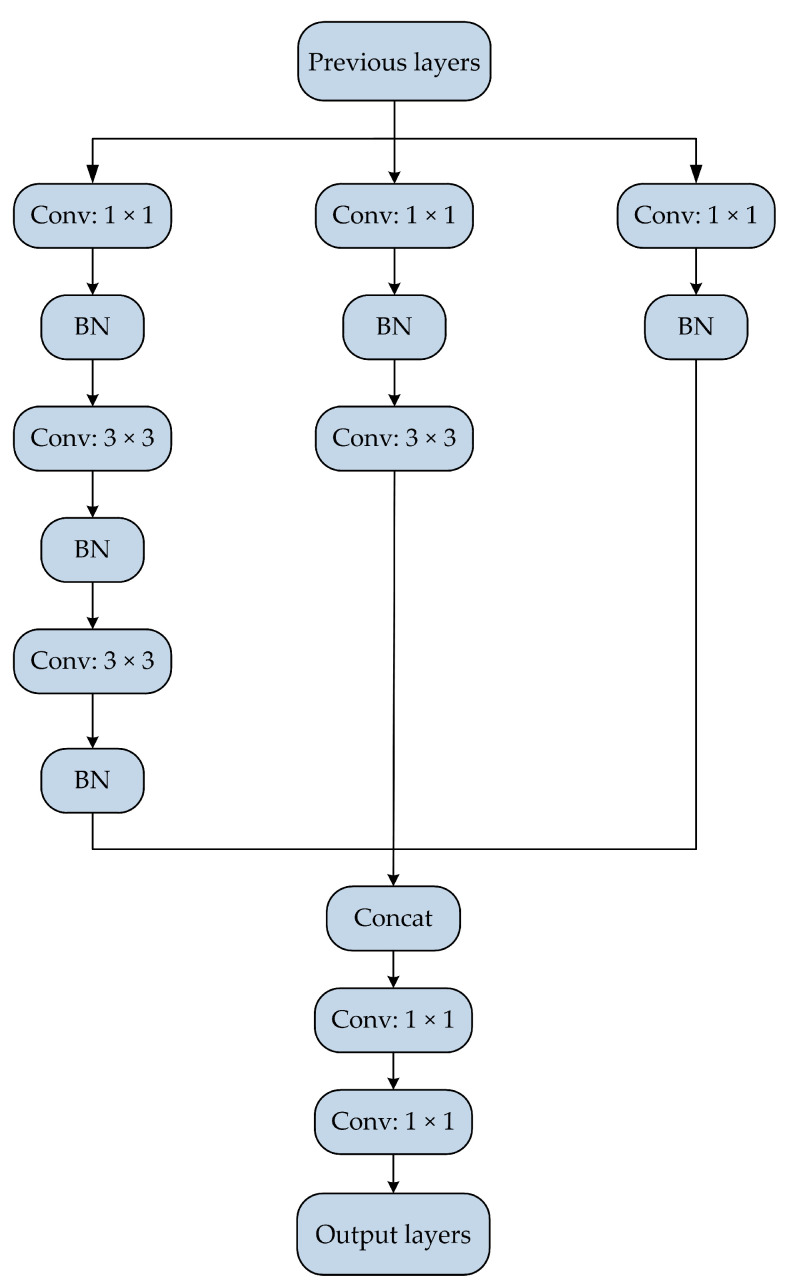
Vehicle detection is an indispensable part of environmental perception technology for smart cars. Aiming at the issues that conventional vehicle detection can be easily restricted by environmental conditions and cannot have accuracy and real-time performance, this article proposes a front vehicle detection algorithm for smart car based on improved SSD model. Single shot multibox detector (SSD) is one of the current mainstream object detection frameworks based on deep learning. This work first briefly introduces the SSD network model and analyzes and summarizes its problems and shortcomings in vehicle detection. Then, targeted improvements are performed to the SSD network model, including major advancements to the basic structure of the SSD model, the use of weighted mask in network training, and enhancement to the loss function. Finally, vehicle detection experiments are carried out on the basis of the KITTI vision benchmark suite and self-made vehicle dataset to observe the algorithm performance in different complicated environments and weather conditions. The test results based on the KITTI dataset show that the mAP value reaches 92.18%, and the average processing time per frame is 15 ms. Compared with the existing deep learning-based detection methods, the proposed algorithm can obtain accuracy and real-time performance simultaneously. Meanwhile, the algorithm has excellent robustness and environmental adaptability for complicated traffic environments and anti-jamming capabilities for bad weather conditions. These factors are of great significance to ensure the accurate and efficient operation of smart cars in real traffic scenarios and are beneficial to vastly reduce the incidence of traffic accidents and fully protect people's lives and property.
车辆检测是智能汽车环境感知技术中不可或缺的一部分。针对传统车辆检测易受环境条件限制、无法兼顾准确性和实时性的问题,本文提出了一种基于改进 SSD 模型的智能汽车前方车辆检测算法。单阶段多框检测器(SSD)是基于深度学习的当前主流目标检测框架之一。本文首先简要介绍了 SSD 网络模型,并分析总结了其在车辆检测中的问题和不足。然后,针对 SSD 网络模型进行了有针对性的改进,包括对 SSD 模型的基本结构、网络训练中使用加权掩模和增强损失函数进行了重大改进。最后,在 KITTI 视觉基准套件和自制车辆数据集的基础上进行了车辆检测实验,观察算法在不同复杂环境和天气条件下的性能。基于 KITTI 数据集的测试结果表明,mAP 值达到 92.18%,每帧的平均处理时间为 15ms。与现有的基于深度学习的检测方法相比,所提出的算法可以同时获得准确性和实时性。同时,该算法对复杂交通环境具有出色的鲁棒性和环境适应性,对恶劣天气条件具有抗干扰能力。这些因素对于确保智能汽车在实际交通场景中的准确高效运行具有重要意义,有利于大大降低交通事故的发生率,充分保护人民的生命财产安全。