Bukhari Syed Ali Raza, Saleem Muhammad Mubasher, Khan Umar Shahbaz, Hamza Amir, Iqbal Javaid, Shakoor Rana Iqtidar
Department of Mechatronics Engineering, National University of Sciences and Technology, Islamabad 44000, Pakistan.
National Centre of Robotics and Automation(NCRA), Islamabad 44000, Pakistan.
Micromachines (Basel). 2020 Sep 17;11(9):862. doi: 10.3390/mi11090862.
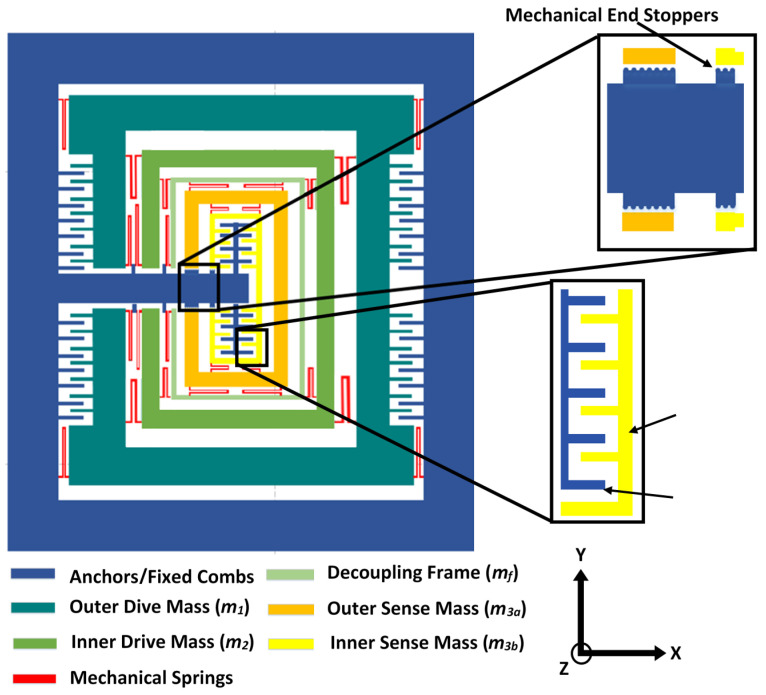
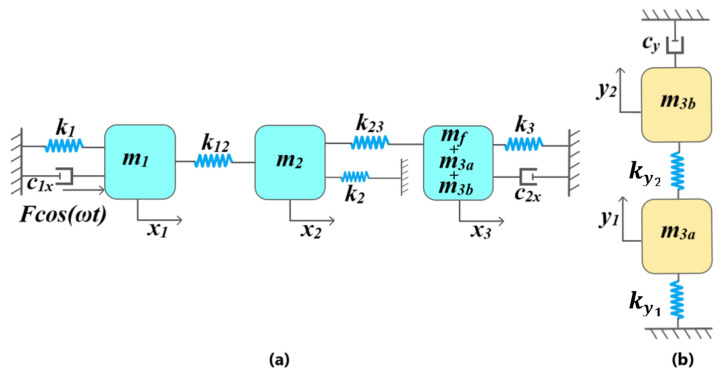
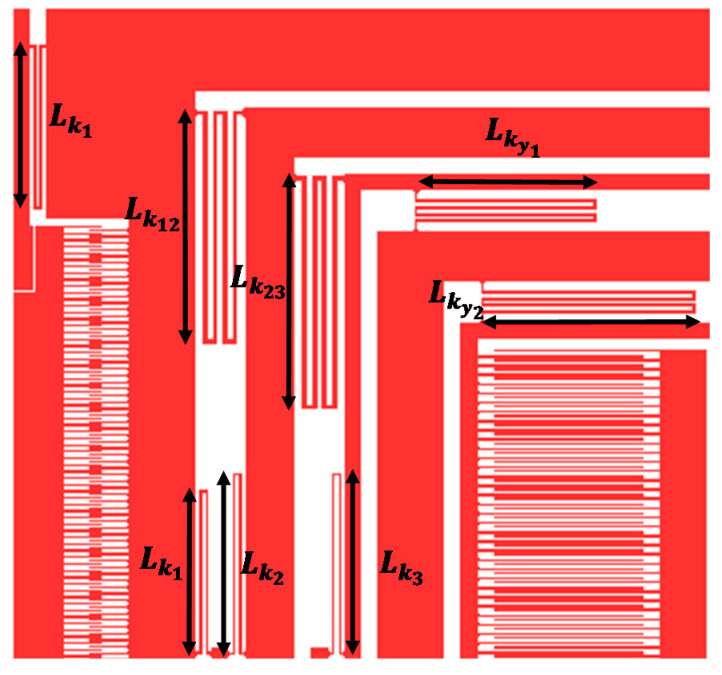
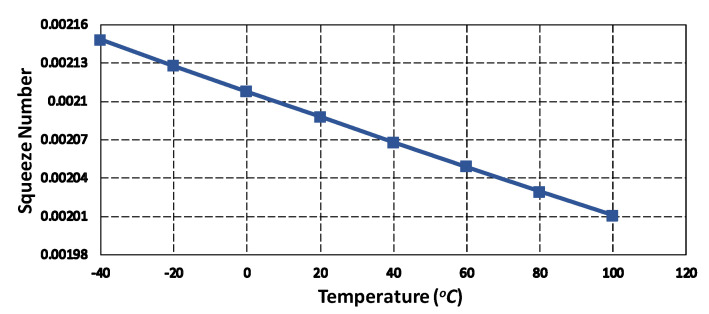
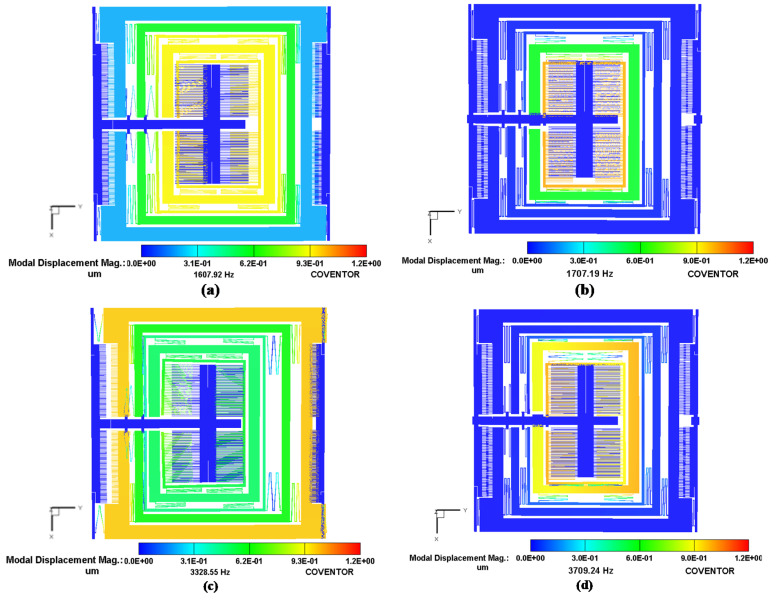
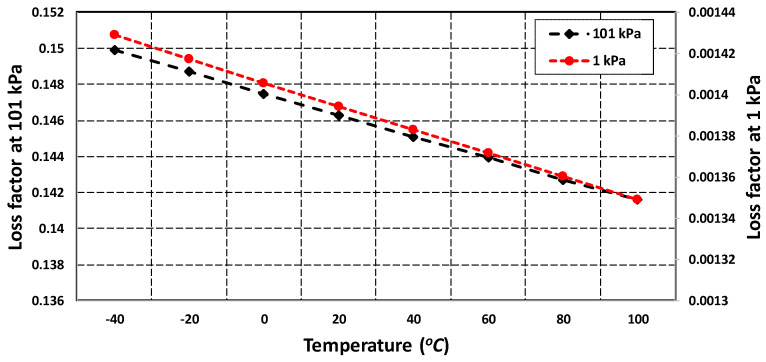
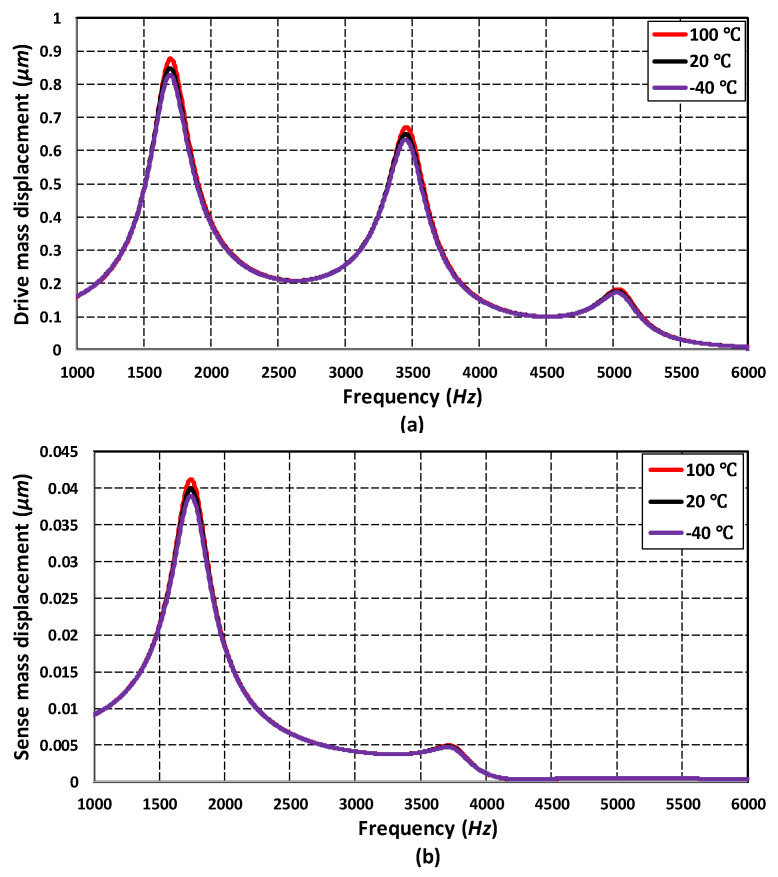
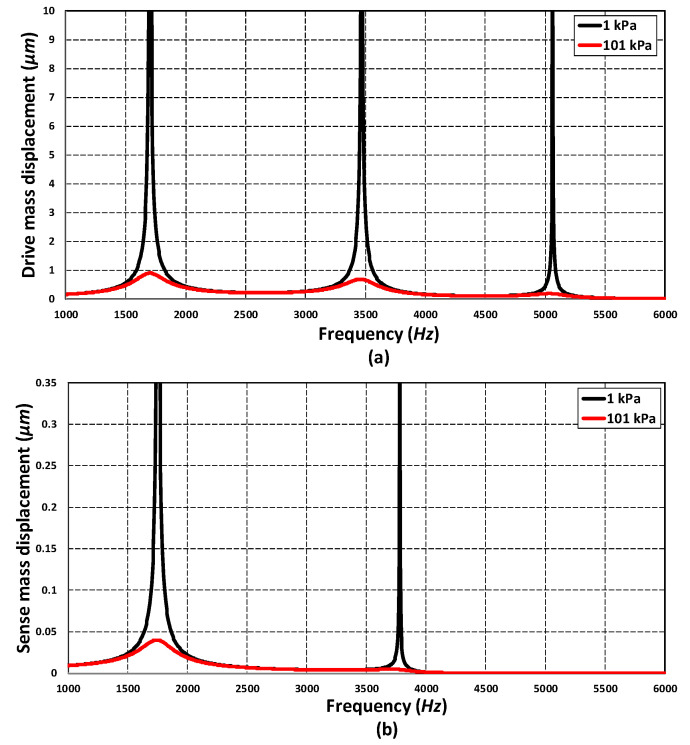
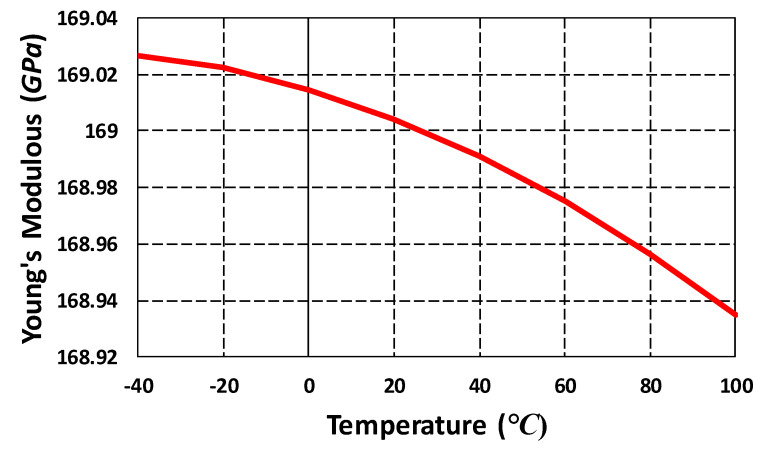
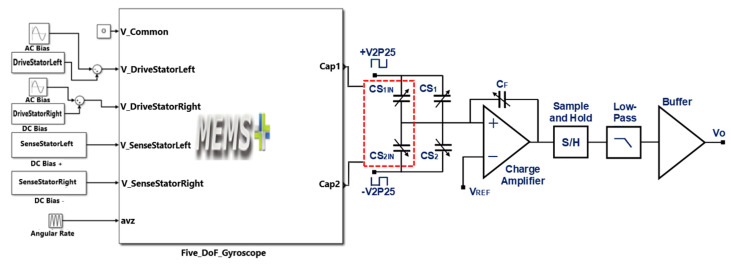
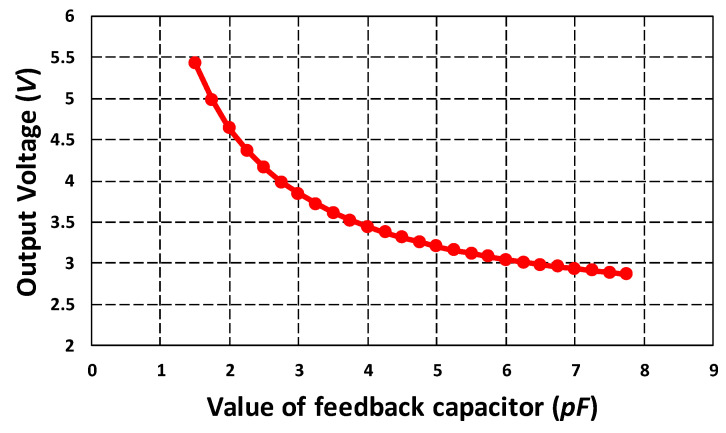
This paper presents microfabrication process-driven design of a multi-degree of freedom (multi-DoF) non-resonant electrostatic microelectromechanical systems (MEMS) gyroscope by considering the design constraints of commercially available low-cost and widely-used silicon-on-insulator multi-user MEMS processes (SOIMUMPs), with silicon as a structural material. The proposed design consists of a 3-DoF drive mode oscillator with the concept of addition of a collider mass which transmits energy from the drive mass to the passive sense mass. In the sense direction, 2-DoF sense mode oscillator is used to achieve dynamically-amplified displacement in the sense mass. A detailed analytical model for the dynamic response of MEMS gyroscope is presented and performance characteristics are validated through finite element method (FEM)-based simulations. The effect of operating air pressure and temperature variations on the air damping and resulting dynamic response is analyzed. The thermal stability of the design and corresponding effect on the mechanical and capacitive sensitivity, for an operating temperature range of -40 °C to 100 °C, is presented. The results showed that the proposed design is thermally stable, robust to environmental variations, and process tolerances with a wide operational bandwidth and high sensitivity. Moreover, a system-level model of the proposed gyroscope and its integration with the sensor electronics is presented to estimate the voltage sensitivity under the constraints of the readout electronic circuit.
本文提出了一种基于微制造工艺驱动的多自由度(multi-DoF)非谐振静电微机电系统(MEMS)陀螺仪设计,该设计考虑了商用低成本且广泛使用的绝缘体上硅多用户MEMS工艺(SOIMUMPs)的设计约束,以硅作为结构材料。所提出的设计包括一个三自由度驱动模式振荡器,其概念是增加一个碰撞质量块,该质量块将能量从驱动质量块传递到无源敏感质量块。在敏感方向上,使用二自由度敏感模式振荡器在敏感质量块中实现动态放大位移。本文给出了MEMS陀螺仪动态响应的详细分析模型,并通过基于有限元方法(FEM)的模拟验证了其性能特性。分析了工作气压和温度变化对空气阻尼及由此产生的动态响应的影响。给出了该设计在-40°C至100°C工作温度范围内的热稳定性及其对机械和电容灵敏度的相应影响。结果表明,所提出的设计具有热稳定性,对环境变化和工艺公差具有鲁棒性,具有宽的工作带宽和高灵敏度。此外,还给出了所提出陀螺仪的系统级模型及其与传感器电子器件的集成,以估计在读出电子电路约束下的电压灵敏度。