Department of Electronic Engineering, Computer Systems and Automatics, University of Huelva, Av. de las Artes s/n, 21007 Huelva, Spain.
Sensors (Basel). 2021 Jan 13;21(2):529. doi: 10.3390/s21020529.
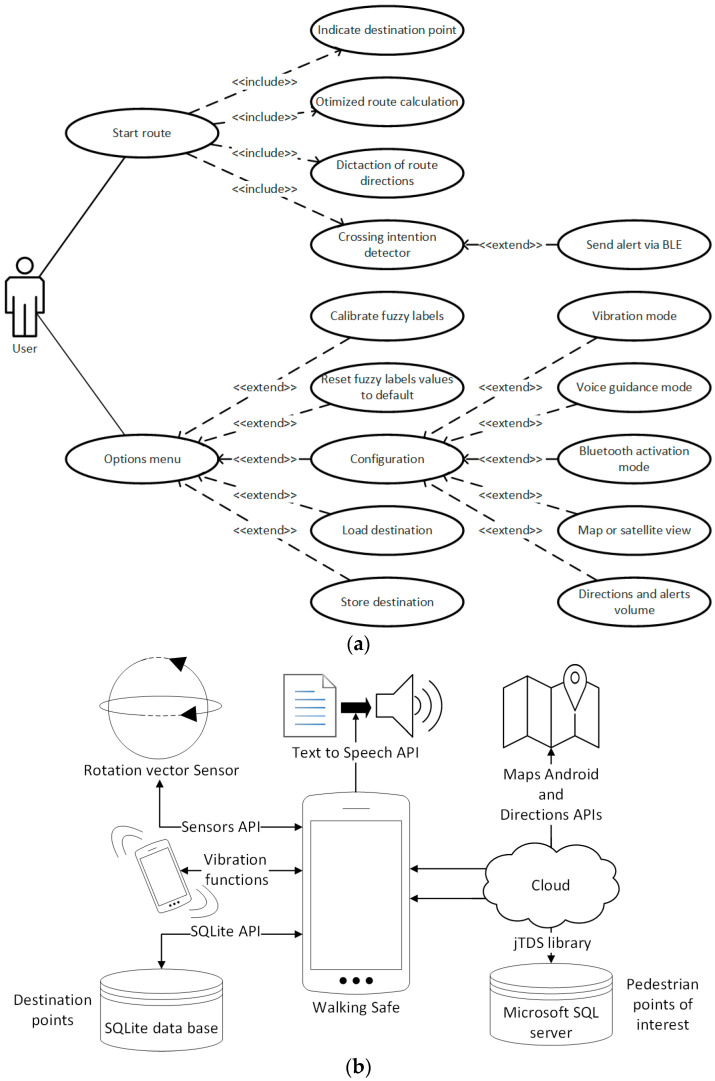
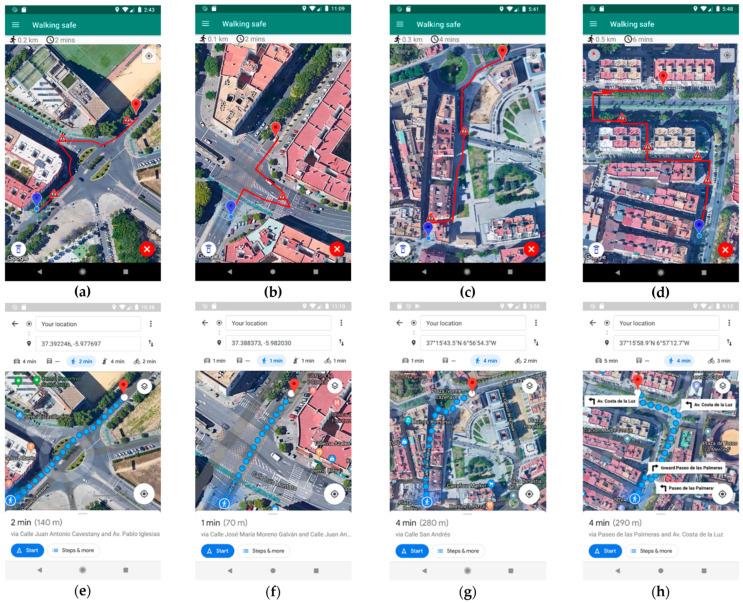
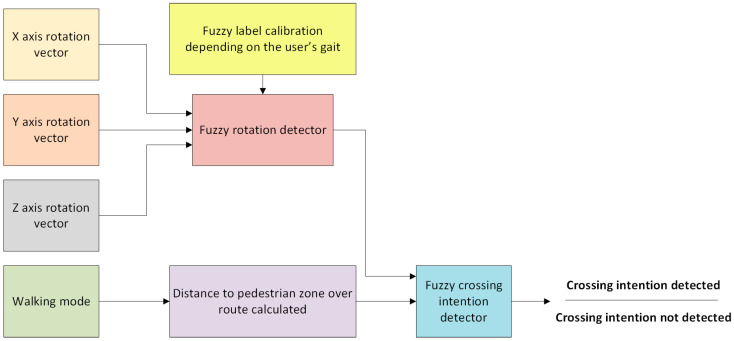
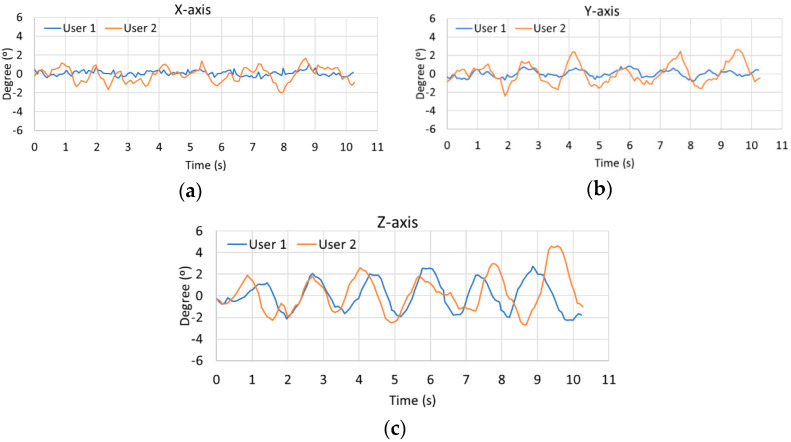
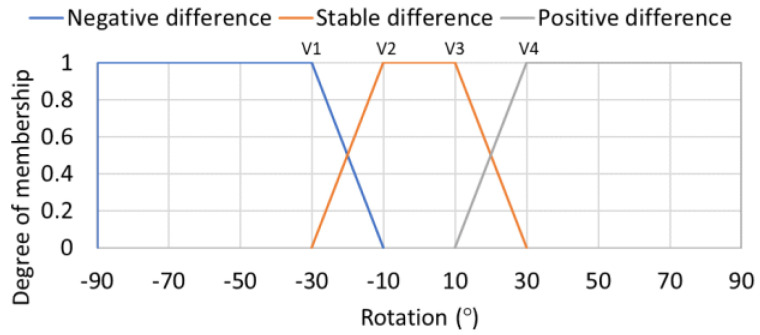
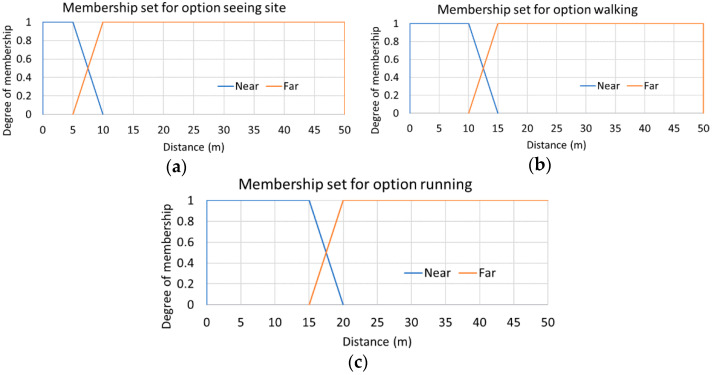
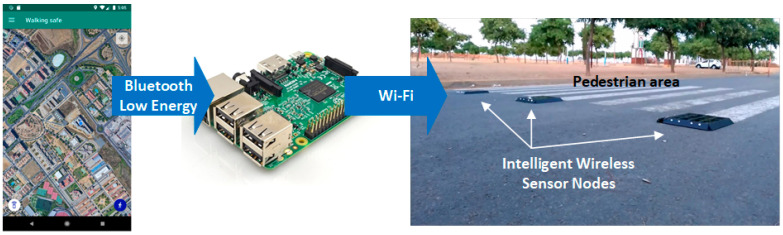
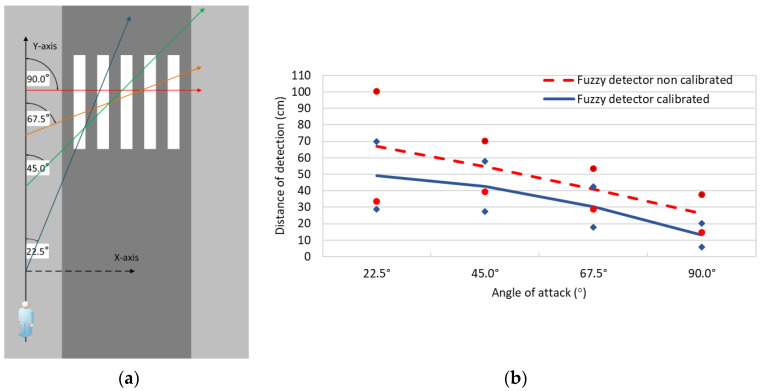
Improving road safety through artificial intelligence is now crucial to achieving more secure smart cities. With this objective, a mobile app based on the integration of the smartphone sensors and a fuzzy logic strategy to determine the pedestrian's crossing intention around crosswalks is presented. The app developed also allows the calculation, tracing and guidance of safe routes thanks to an optimization algorithm that includes pedestrian areas on the paths generated over the whole city through a cloud database (i.e., zebra crossings, pedestrian streets and walkways). The experimentation carried out consisted in testing the fuzzy logic strategy with a total of 31 volunteers crossing and walking around a crosswalk. For that, the fuzzy logic approach was subjected to a total of 3120 samples generated by the volunteers. It has been proven that a smartphone can be successfully used as a crossing intention detector system with an accuracy of 98.63%, obtaining a true positive rate of 98.27% and a specificity of 99.39% according to a receiver operating characteristic analysis. Finally, a total of 30 routes were calculated by the proposed algorithm and compared with Google Maps considering the values of time, distance and safety along the routes. As a result, the routes generated by the proposed algorithm were safer than the routes obtained with Google Maps, achieving an increase in the use of safe pedestrian areas of at least 183%.
通过人工智能提高道路安全对于实现更安全的智慧城市至关重要。为此,提出了一种基于智能手机传感器集成和模糊逻辑策略的移动应用程序,用于确定行人和在十字路口周围的过马路意图。该应用程序还可以通过优化算法计算、跟踪和引导安全路线,该算法包括在整个城市的生成路径上的行人区域(即斑马线、步行街和人行道)的云数据库。进行的实验包括使用总共 31 名志愿者在十字路口进行测试,测试模糊逻辑策略。为此,志愿者总共生成了 3120 个样本,对模糊逻辑方法进行了测试。结果证明,智能手机可以成功用作具有 98.63%准确率的过马路意图检测系统,根据接收者操作特征分析,得到了 98.27%的真阳性率和 99.39%的特异性。最后,根据提出的算法总共计算了 30 条路线,并与谷歌地图进行了比较,考虑了路线上的时间、距离和安全性。结果表明,与谷歌地图相比,提出的算法生成的路线更安全,至少增加了 183%的安全行人区域的使用。