Brinton Mark R, Barcikowski Elliott, Davis Tyler, Paskett Michael, George Jacob A, Clark Gregory A
Biomedical Engineering, University of Utah, Salt Lake City, UT, United States.
Ripple Neuro, Salt Lake City, UT, United States.
Front Robot AI. 2020 Sep 25;7:559034. doi: 10.3389/frobt.2020.559034. eCollection 2020.
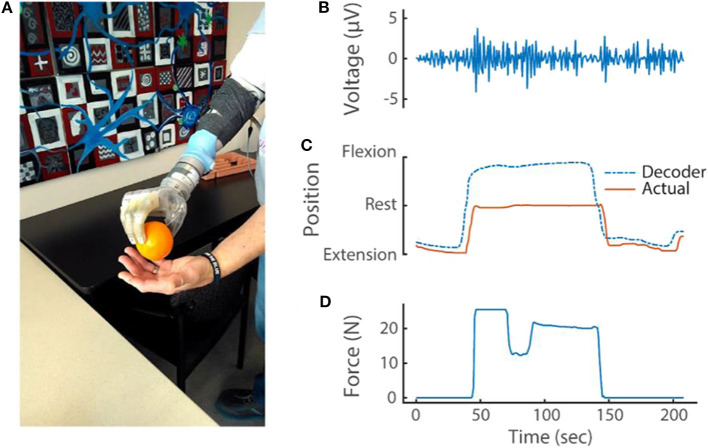
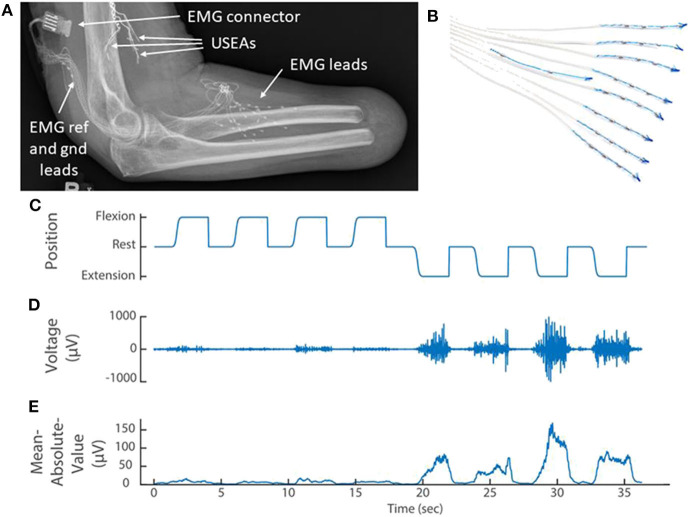
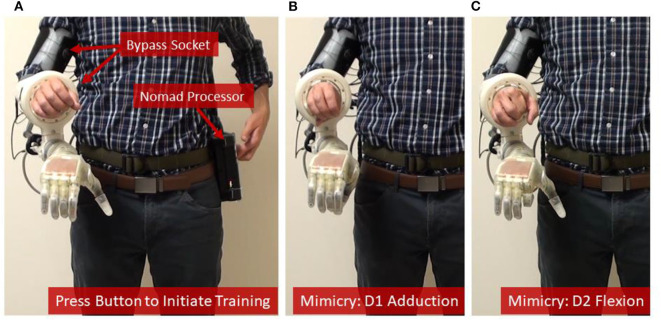
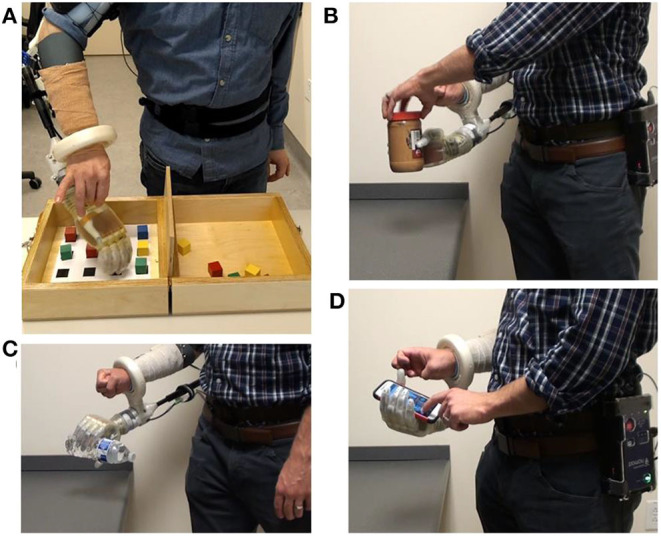
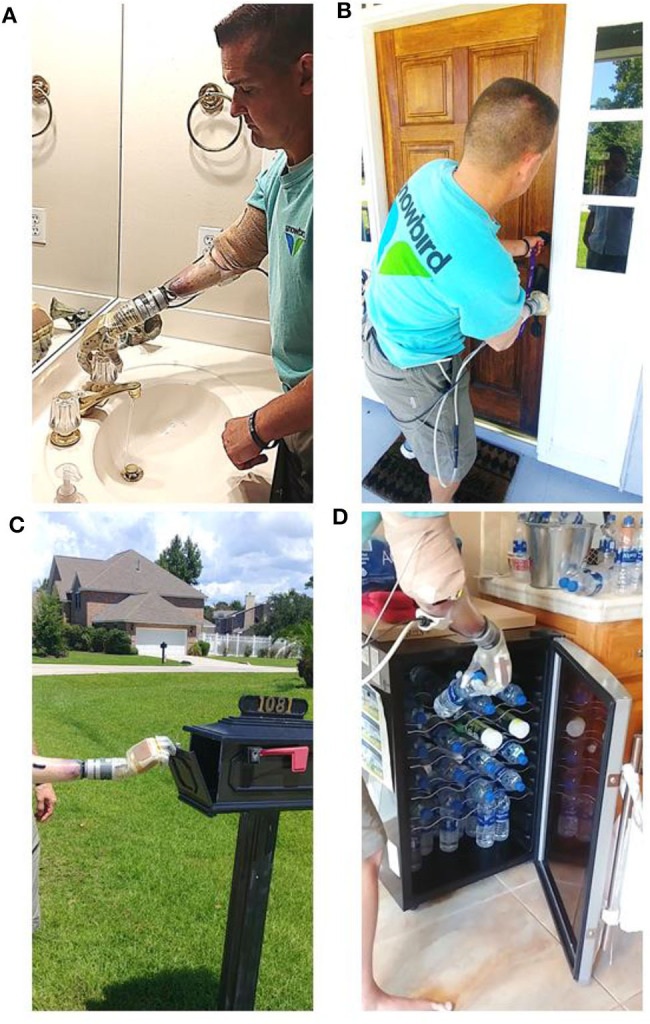
This paper describes a portable, prosthetic control system and the first at-home use of a multi-degree-of-freedom, proportionally controlled bionic arm. The system uses a modified Kalman filter to provide 6 degree-of-freedom, real-time, proportional control. We describe (a) how the system trains motor control algorithms for use with an advanced bionic arm, and (b) the system's ability to record an unprecedented and comprehensive dataset of EMG, hand positions and force sensor values. Intact participants and a transradial amputee used the system to perform activities-of-daily-living, including bi-manual tasks, in the lab and at home. This technology enables at-home dexterous bionic arm use, and provides a high-temporal resolution description of daily use-essential information to determine clinical relevance and improve future research for advanced bionic arms.
本文介绍了一种便携式假肢控制系统以及首个在家中使用的多自由度、比例控制的仿生手臂。该系统使用改进的卡尔曼滤波器来提供6自由度的实时比例控制。我们描述了(a)该系统如何训练用于先进仿生手臂的运动控制算法,以及(b)该系统记录肌电图、手部位置和力传感器值的前所未有的全面数据集的能力。健全的参与者和一名经桡骨截肢者使用该系统在实验室和家中进行日常生活活动,包括双手任务。这项技术使在家中灵活使用仿生手臂成为可能,并提供了高时间分辨率的日常使用基本信息描述,以确定临床相关性并改进未来对先进仿生手臂的研究。