Remonda Adrian, Veas Eduardo, Luzhnica Granit
Know-Center, Graz, Styria, Austria.
Graz University of Technology, Graz, Styria, Austria.
PLoS One. 2021 Feb 3;16(2):e0245320. doi: 10.1371/journal.pone.0245320. eCollection 2021.
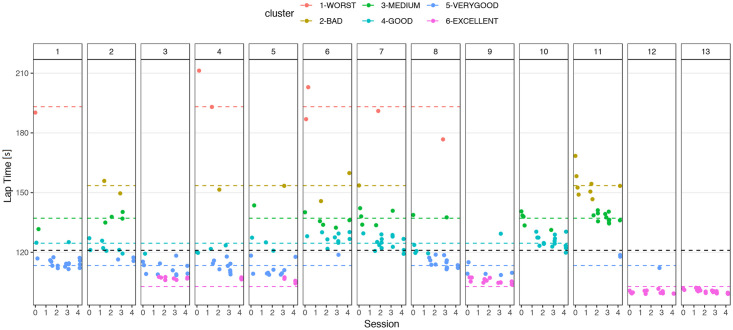
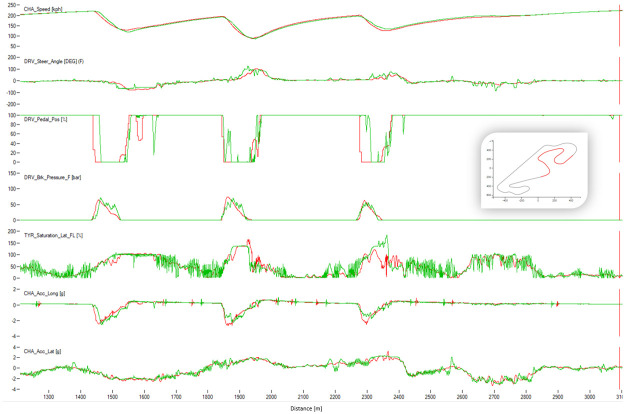
Motorsports have become an excellent playground for testing the limits of technology, machines, and human drivers. This paper presents a study that used a professional racing simulator to compare the behavior of human and autonomous drivers under an aggressive driving scenario. A professional simulator offers a close-to-real emulation of underlying physics and vehicle dynamics, as well as a wealth of clean telemetry data. In the first study, the participants' task was to achieve the fastest lap while keeping the car on the track. We grouped the resulting laps according to the performance (lap-time), defining driving behaviors at various performance levels. An extensive analysis of vehicle control features obtained from telemetry data was performed with the goal of predicting the driving performance and informing an autonomous system. In the second part of the study, a state-of-the-art reinforcement learning (RL) algorithm was trained to control the brake, throttle and steering of the simulated racing car. We investigated how the features used to predict driving performance in humans can be used in autonomous driving. Our study investigates human driving patterns with the goal of finding traces that could improve the performance of RL approaches. Conversely, they can also be applied to training (professional) drivers to improve their racing line.
赛车运动已成为测试技术、机器和人类驾驶员极限的绝佳平台。本文介绍了一项研究,该研究使用专业赛车模拟器比较了在激进驾驶场景下人类驾驶员和自动驾驶车辆的行为。专业模拟器能近乎真实地模拟基础物理和车辆动力学,还能提供大量清晰的遥测数据。在第一项研究中,参与者的任务是在保持车辆在赛道上行驶的同时完成最快单圈。我们根据性能(单圈时间)对完成的单圈进行分组,定义了不同性能水平下的驾驶行为。为了预测驾驶性能并为自动驾驶系统提供信息,我们对从遥测数据中获取的车辆控制特征进行了广泛分析。在研究的第二部分,我们训练了一种先进的强化学习(RL)算法来控制模拟赛车的刹车、油门和转向。我们研究了用于预测人类驾驶性能的特征如何应用于自动驾驶。我们的研究旨在探究人类驾驶模式,以寻找能够提升RL方法性能的线索。相反,这些线索也可应用于训练(专业)驾驶员以优化他们的赛车线路。