Su Yingchun, Qiu Tian, Song Wen, Han Xiaojun, Sun Mengmeng, Wang Zhao, Xie Hui, Dong Mingdong, Chen Menglin
State Key Laboratory of Urban Water Resource and Environment School of Chemistry and Chemical Engineering Harbin Institute of Technology Harbin 150001 China.
Interdisciplinary Nanoscience Center (iNANO) Sino-Danish Center for Education and Research (SDC) Aarhus University Aarhus C DK-8000 Denmark.
Adv Sci (Weinh). 2021 Jan 4;8(3):2003177. doi: 10.1002/advs.202003177. eCollection 2021 Feb.
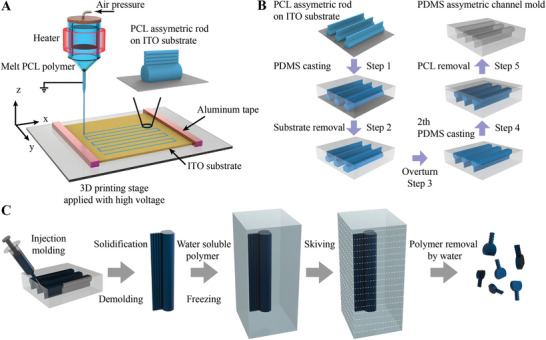
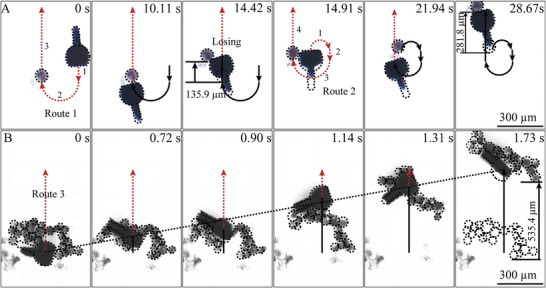
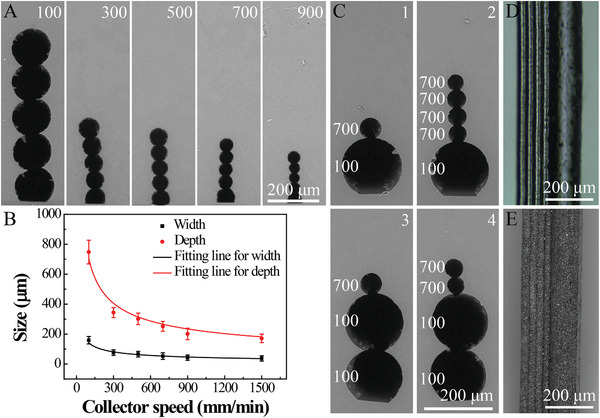
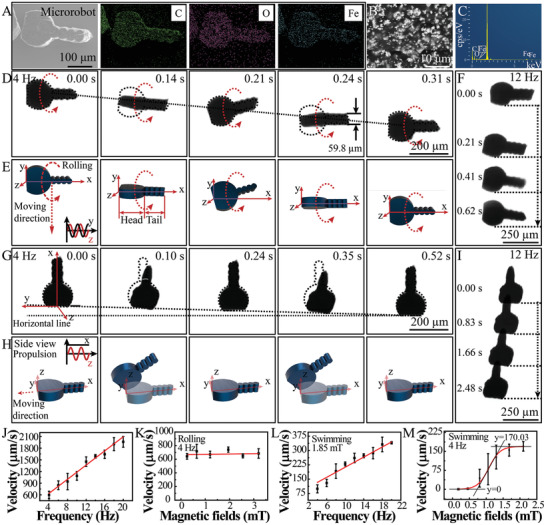
The magnetic microrobots actuated by an external magnetic field can access distant, enclosed, and small spaces under fuel-free conditions, which is apromising technology for manipulation and delivery under microenvironment; however, the complicated fabrication method limits their applications. Herein, three techniques including melt electrospinning writing (MEW), micromolding, and skiving process are combined to successfully mass-produce tadpole-like magnetic polycaprolactone/FeO (PCL/FeO) microrobot. Importantly, the tadpole-like microrobots under an external magnetic field can achieve two locomotions: rolling mode and propulsion mode. The rolling motion can approach the working destination quickly with a speed of ≈2 mm s. The propulsion motion (0-340 µm s) can handle a microcargo. Such a simple and cost-effective production method shows a great potential for scale-up fabrication of advanced shape-design, mass-production, and multifunctionality microrobot.
由外部磁场驱动的磁性微型机器人可以在无燃料条件下进入遥远、封闭和狭小的空间,这是一种在微环境下进行操作和输送的有前途的技术;然而,复杂的制造方法限制了它们的应用。在此,将熔体静电纺丝书写(MEW)、微成型和刮削工艺三种技术相结合,成功地批量生产了蝌蚪状磁性聚己内酯/氧化亚铁(PCL/FeO)微型机器人。重要的是,蝌蚪状微型机器人在外部磁场作用下可以实现两种运动:滚动模式和推进模式。滚动运动可以以约2毫米/秒的速度快速接近工作目的地。推进运动(0-340微米/秒)可以搬运微货物。这种简单且经济高效的生产方法在先进形状设计、大规模生产和多功能微型机器人的扩大制造方面显示出巨大潜力。