Wang Yu, Li Meng, Chang Jan-Kai, Aurelio Daniele, Li Wenyi, Kim Beom Joon, Kim Jae Hwan, Liscidini Marco, Rogers John A, Omenetto Fiorenzo G
Silklab, Suite 4875, 200 Boston Avenue, Tufts University, Medford, MA, USA.
Department of Biomedical Engineering, Tufts University, Medford, MA, USA.
Nat Commun. 2021 Mar 12;12(1):1651. doi: 10.1038/s41467-021-21764-6.
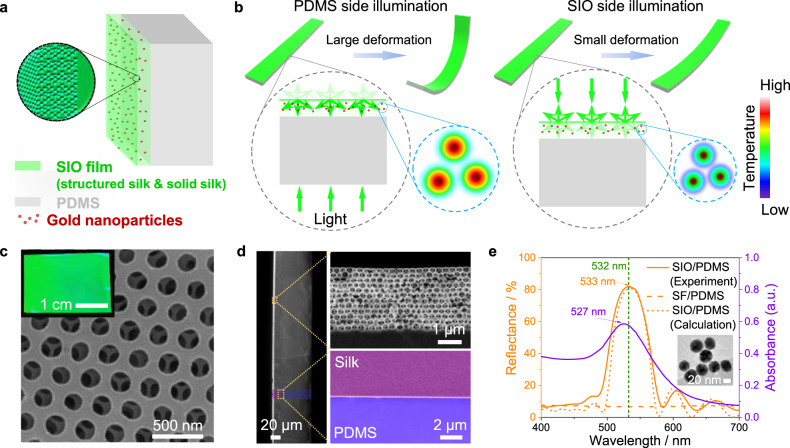
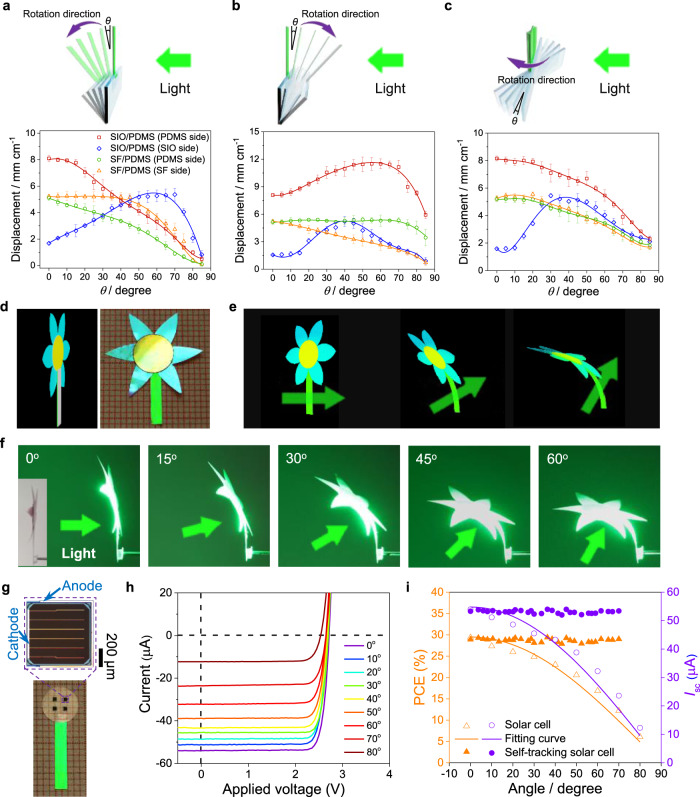
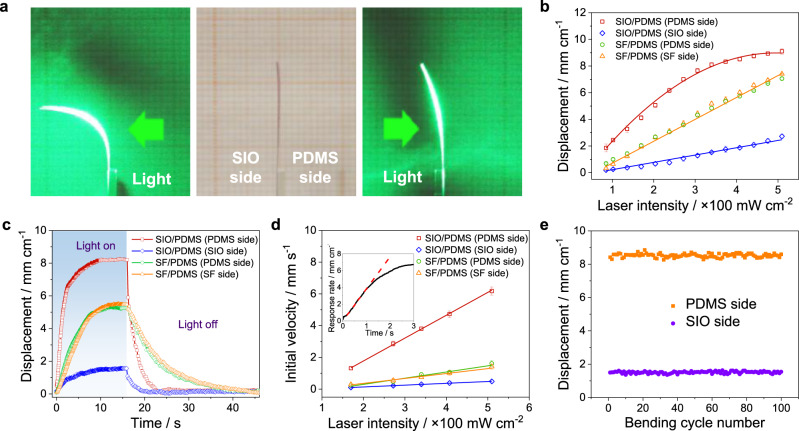
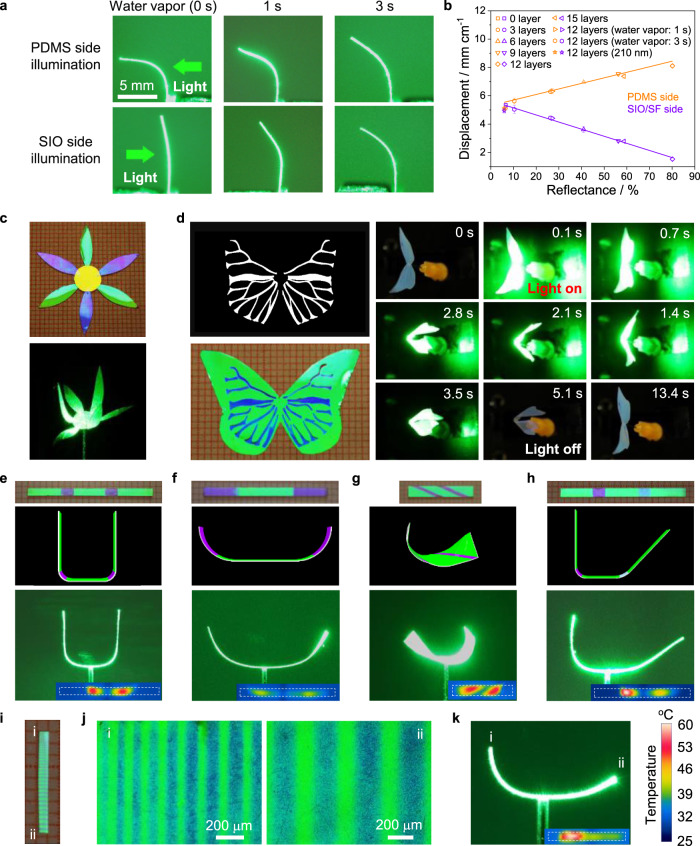
Natural systems display sophisticated control of light-matter interactions at multiple length scales for light harvesting, manipulation, and management, through elaborate photonic architectures and responsive material formats. Here, we combine programmable photonic function with elastomeric material composites to generate optomechanical actuators that display controllable and tunable actuation as well as complex deformation in response to simple light illumination. The ability to topographically control photonic bandgaps allows programmable actuation of the elastomeric substrate in response to illumination. Complex three-dimensional configurations, programmable motion patterns, and phototropic movement where the material moves in response to the motion of a light source are presented. A "photonic sunflower" demonstrator device consisting of a light-tracking solar cell is also illustrated to demonstrate the utility of the material composite. The strategy presented here provides new opportunities for the future development of intelligent optomechanical systems that move with light on demand.
自然系统通过精心设计的光子结构和响应性材料形式,在多个长度尺度上对光与物质的相互作用进行复杂控制,以实现光的收集、操纵和管理。在这里,我们将可编程光子功能与弹性体材料复合材料相结合,以生成光机械致动器,该致动器在简单光照下显示出可控和可调的致动以及复杂的变形。通过地形控制光子带隙的能力允许弹性体基板响应光照进行可编程致动。展示了复杂的三维配置、可编程运动模式以及材料响应光源运动而移动的光致运动。还展示了一个由光跟踪太阳能电池组成的“光子向日葵”演示装置,以证明材料复合材料的实用性。这里提出的策略为按需随光移动的智能光机械系统的未来发展提供了新机会。