Department of Biomedical Engineering, National Cheng Kung University, No.1, University Road, Tainan 70101, Taiwan.
Brain Navi Biotechnology Co., Ltd., No.66-1, Shengyi 5th Rd. Zhubei City, Hsinchu County 302041, Taiwan.
Sensors (Basel). 2021 Apr 22;21(9):2927. doi: 10.3390/s21092927.
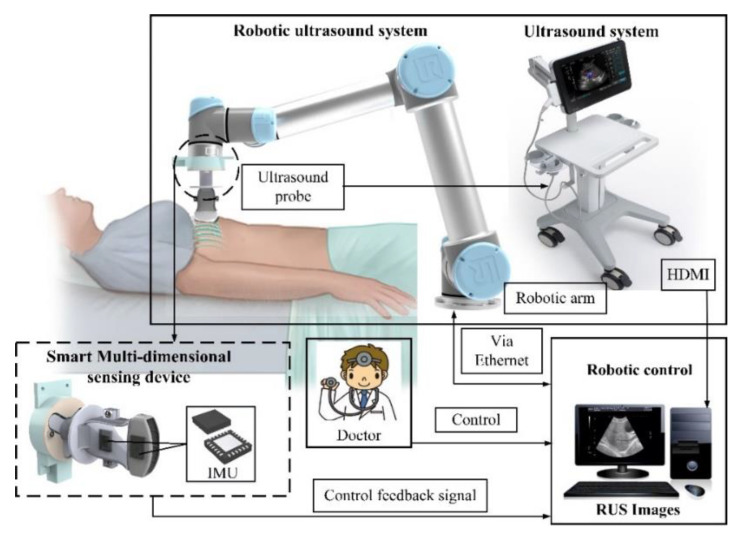
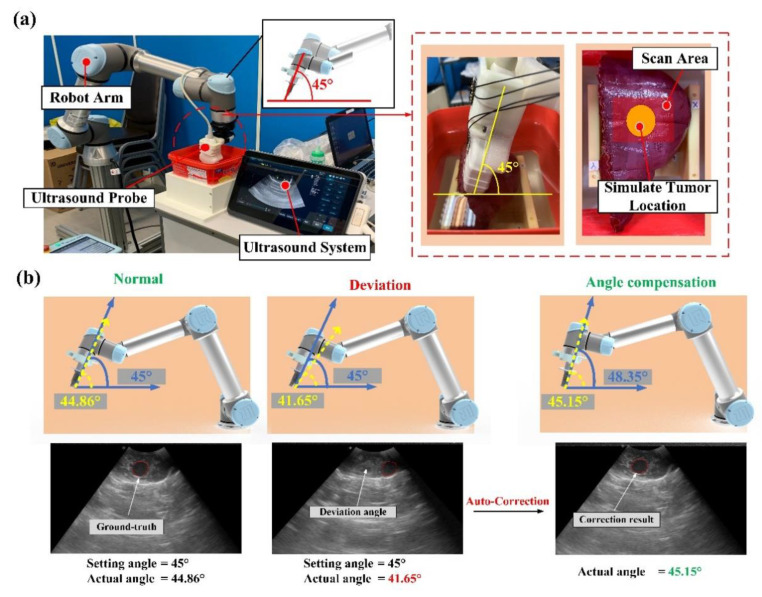
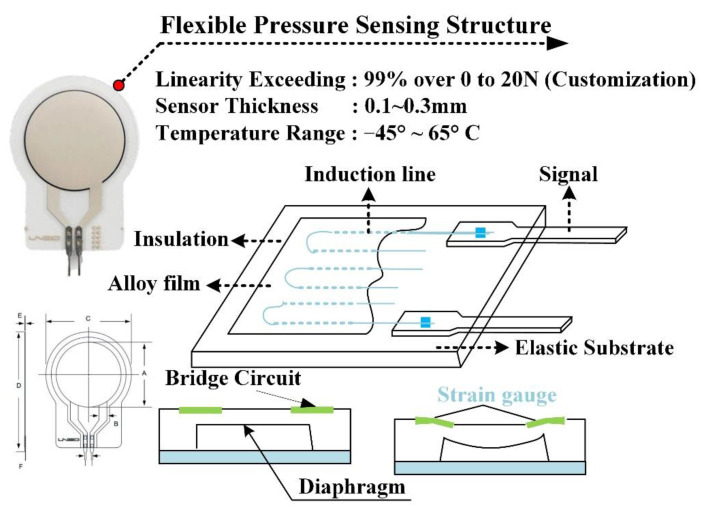
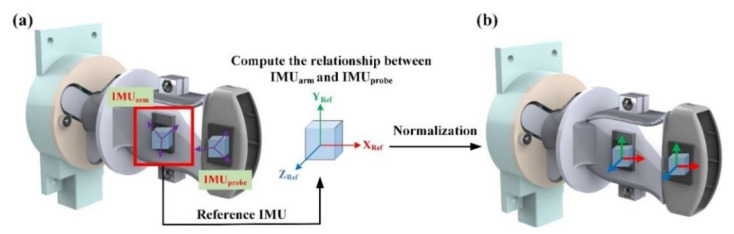
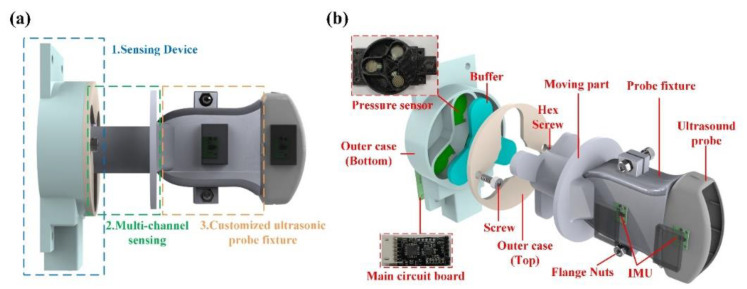
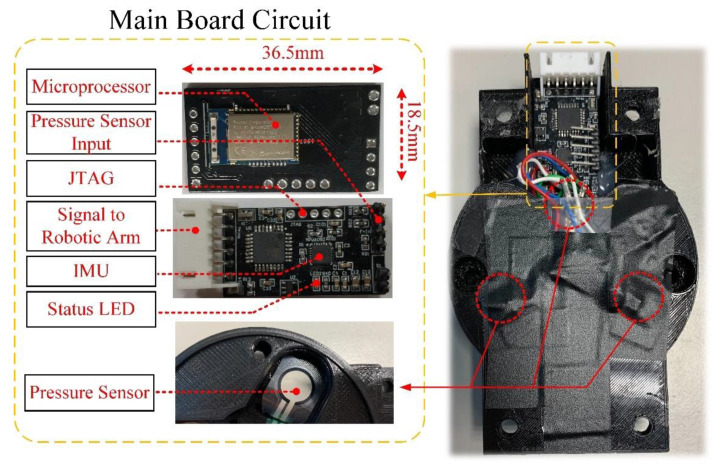
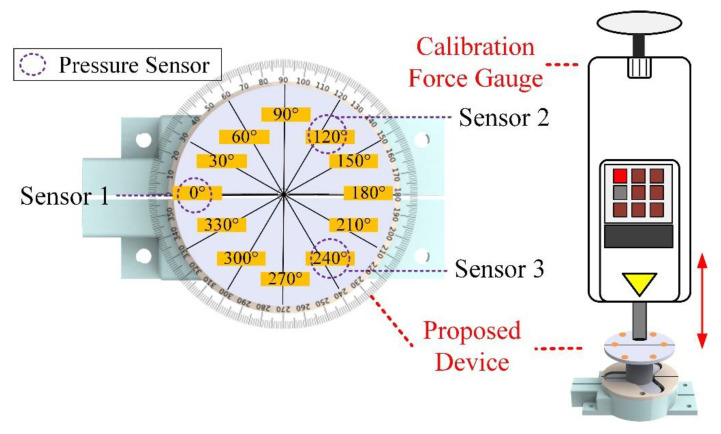
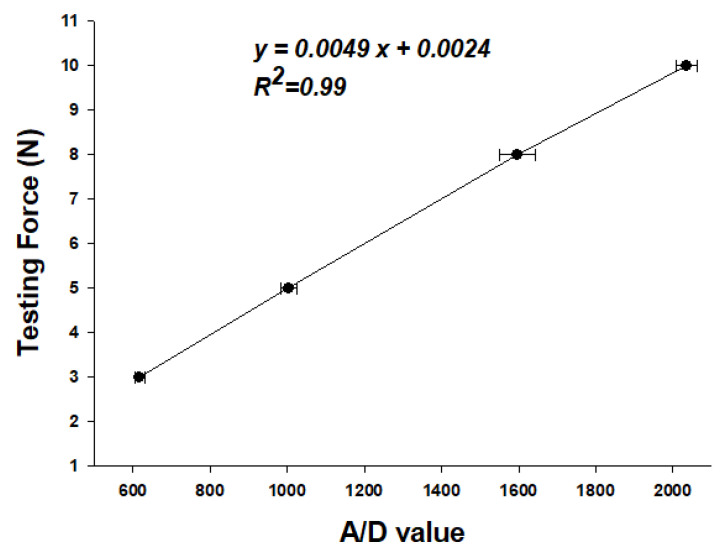
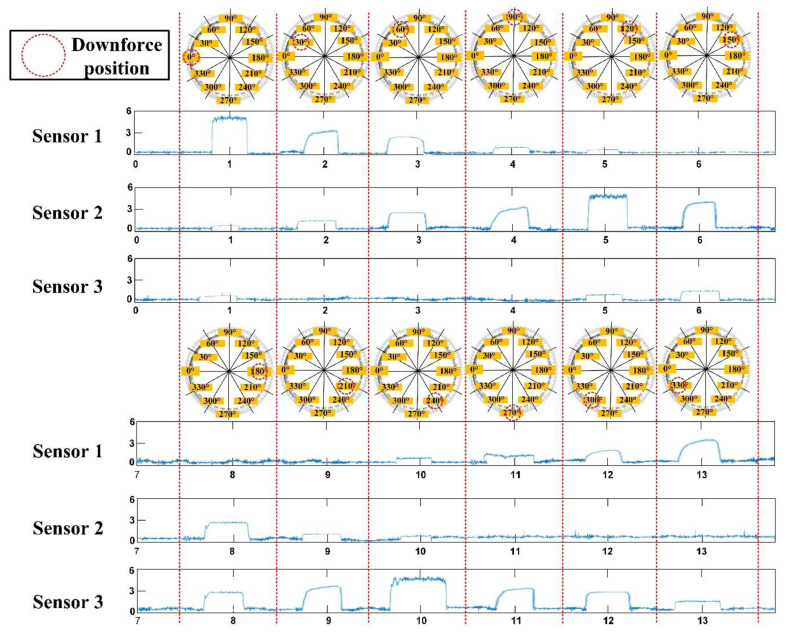
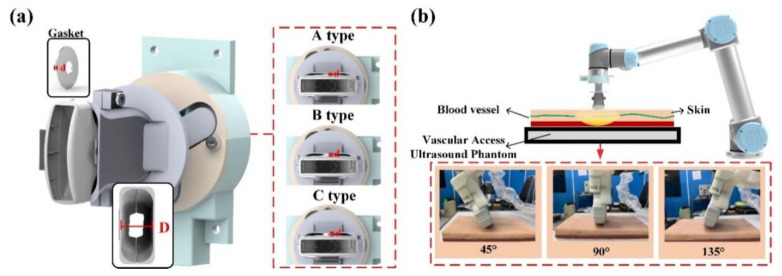
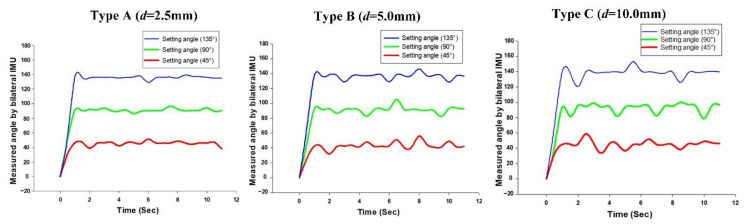
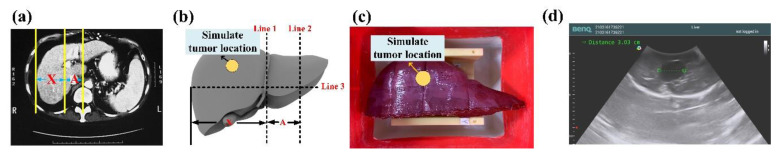
An ultrasonic examination is a clinically universal and safe examination method, and with the development of telemedicine and precision medicine, the robotic ultrasound system (RUS) integrated with a robotic arm and ultrasound imaging system receives increasing attention. As the RUS requires precision and reproducibility, it is important to monitor the real-time calibration of the RUS during examination, especially the angle of the probe for image detection and its force on the surface. Additionally, to speed up the integration of the RUS and the current medical ultrasound system (US), the current RUSs mostly use a self-designed fixture to connect the probe to the arm. If the fixture has inconsistencies, it may cause an operating error. In order to improve its resilience, this study proposed an improved sensing method for real-time force and angle calibration. Based on multichannel pressure sensors, an inertial measurement unit (IMU), and a novel sensing structure, the ultrasonic probe and robotic arm could be simply and rapidly combined, which rendered real-time force and angle calibration at a low cost. The experimental results show that the average success rate of the downforce position identification achieved was 88.2%. The phantom experiment indicated that the method could assist the RUS in the real-time calibration of both force and angle during an examination.
超声检查是一种临床通用且安全的检查方法,随着远程医疗和精准医疗的发展,集成机械臂和超声成像系统的机器人超声系统(RUS)受到越来越多的关注。由于 RUS 需要精确性和可重复性,因此在检查过程中监测 RUS 的实时校准非常重要,特别是用于图像检测的探头角度及其对表面的力。此外,为了加快 RUS 和当前医疗超声系统(US)的集成,当前的 RUS 大多使用自行设计的固定装置将探头连接到机械臂上。如果固定装置不一致,可能会导致操作错误。为了提高其弹性,本研究提出了一种用于实时力和角度校准的改进感应方法。基于多通道压力传感器、惯性测量单元(IMU)和一种新颖的感应结构,超声探头和机械臂可以简单快速地组合在一起,从而以低成本实现实时力和角度校准。实验结果表明,下压力位置识别的平均成功率达到 88.2%。体模实验表明,该方法可以辅助 RUS 在检查过程中实时校准力和角度。