Imperial College Healthcare NHS Trust, London, W2 1NY, UK.
The Hamlyn Centre for Robotic Surgery, Imperial College London, London, UK.
Surg Endosc. 2021 Aug;35(8):4890-4899. doi: 10.1007/s00464-021-08556-1. Epub 2021 May 24.
Interventional endoluminal therapy is rapidly advancing as a minimally invasive surgical technique. The expanding remit of endoscopic therapy necessitates precision control. Eye tracking is an emerging technology which allows intuitive control of devices. This was a feasibility study to establish if a novel eye gaze-controlled endoscopic system could be used to intuitively control an endoscope.
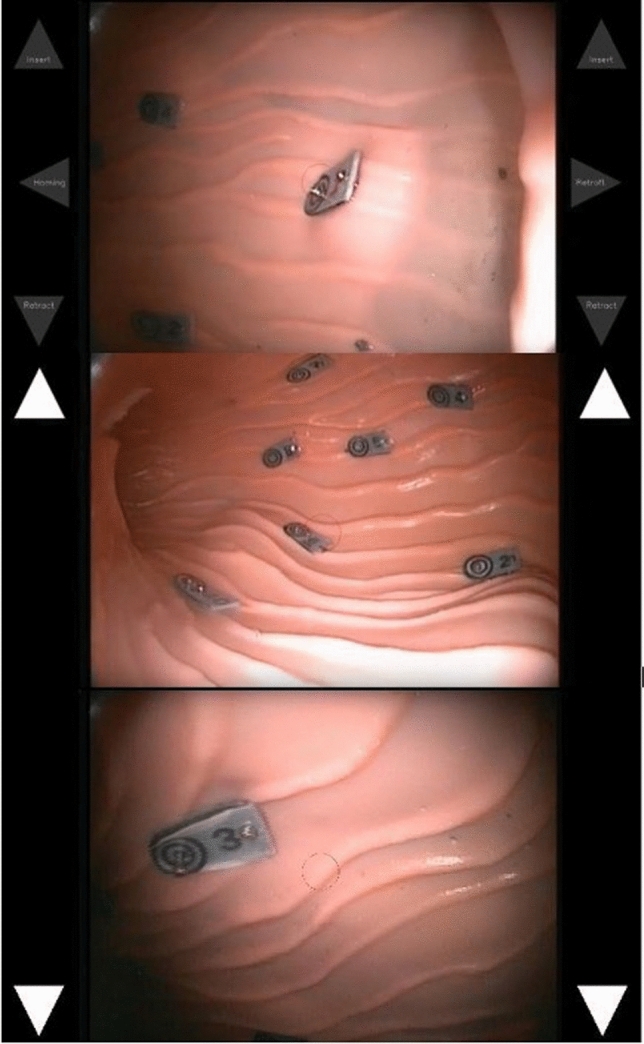
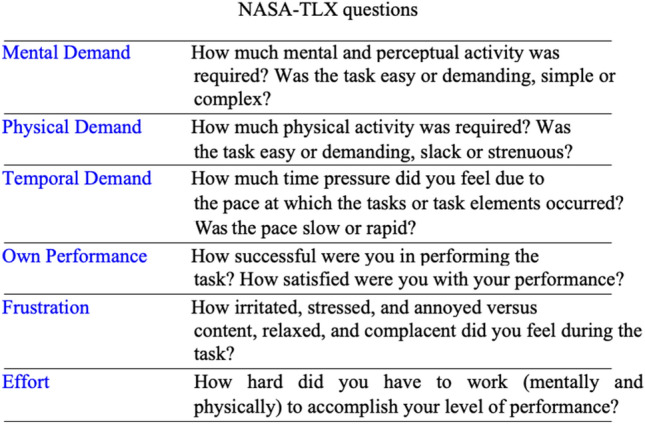
An eye gaze-control system consisting of eye tracking glasses, specialist cameras and a joystick was used to control a robotically driven endoscope allowing steering, advancement, withdrawal and retroflexion. Eight experienced and eight non-endoscopists used both the eye gaze system and a conventional endoscope to identify ten targets in two simulated environments: a sphere and an upper gastrointestinal (UGI) model. Completion of tasks was timed. Subjective feedback was collected from each participant on task load (NASA Task Load Index) and acceptance of technology (Van der Laan scale).
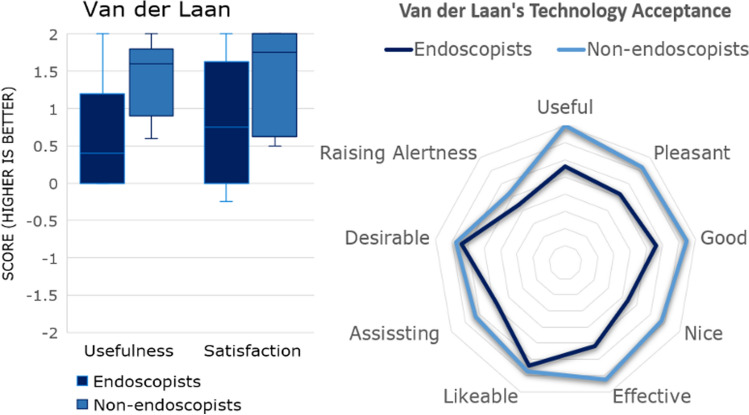
When using gaze-control endoscopy, non-endoscopists were significantly quicker when using gaze-control rather than conventional endoscopy (sphere task 3:54 ± 1:17 vs. 9:05 ± 5:40 min, p = 0.012, and UGI model task 1:59 ± 0:24 vs 3:45 ± 0:53 min, p < .001). Non-endoscopists reported significantly higher NASA-TLX workload total scores using conventional endoscopy versus gaze-control (80.6 ± 11.3 vs 22.5 ± 13.8, p < .001). Endoscopists reported significantly higher total NASA-TLX workload scores using gaze control versus conventional endoscopy (54.2 ± 16 vs 26.9 ± 15.3, p = 0.012). All subjects reported that the gaze-control had positive 'usefulness' and 'satisfaction' score of 0.56 ± 0.83 and 1.43 ± 0.51 respectively.
The novel eye gaze-control system was significantly quicker to use and subjectively lower in workload when used by non-endoscopists. Further work is needed to see if this would translate into a shallower learning curve to proficiency versus conventional endoscopy. The eye gaze-control system appears feasible as an intuitive endoscope control system. Hybrid gaze and hand control may prove a beneficial technology to evolving endoscopic platforms.
介入性腔内治疗作为一种微创外科技术正在迅速发展。内镜治疗范围的扩大需要精确控制。眼动追踪是一种新兴技术,可以实现设备的直观控制。本研究旨在确定一种新型的眼注视控制内镜系统是否可以用于直观地控制内镜。
使用眼动控制系统,包括眼跟踪眼镜、专业相机和操纵杆,控制机器人驱动的内镜,以实现转向、前进、后退和反转。八名经验丰富的内镜医生和八名非内镜医生使用眼注视系统和传统内镜在两个模拟环境中识别十个目标:一个球体和一个上消化道(UGI)模型。记录完成任务的时间。每位参与者都对任务负荷(NASA 任务负荷指数)和技术接受度(范德劳恩量表)进行了主观反馈。
使用注视控制内镜时,非内镜医生使用注视控制时明显快于使用传统内镜(球体任务:3:54±1:17 比 9:05±5:40 分钟,p=0.012,UGI 模型任务:1:59±0:24 比 3:45±0:53 分钟,p<.001)。非内镜医生报告使用传统内镜的 NASA-TLX 总工作量评分明显高于注视控制(80.6±11.3 比 22.5±13.8,p<.001)。内镜医生报告使用注视控制时的 NASA-TLX 总工作量评分明显高于传统内镜(54.2±16 比 26.9±15.3,p=0.012)。所有受试者报告说,注视控制的“有用性”和“满意度”评分分别为 0.56±0.83 和 1.43±0.51。
新型眼注视控制系统在非内镜医生使用时,操作速度明显更快,主观上工作量更小。需要进一步研究,以确定其是否能在学习曲线方面比传统内镜更具优势。眼注视控制系统作为一种直观的内镜控制系统是可行的。眼注视和手混合控制可能是一种有前途的内镜技术。