Welker Cara Gonzalez, Voloshina Alexandra S, Chiu Vincent L, Collins Steven H
Department of Bioengineering, Stanford University, Stanford, CA 94305, USA.
Department of Mechanical Engineering, Stanford University, Stanford, CA 94305, USA.
R Soc Open Sci. 2021 May 5;8(5):202020. doi: 10.1098/rsos.202020.
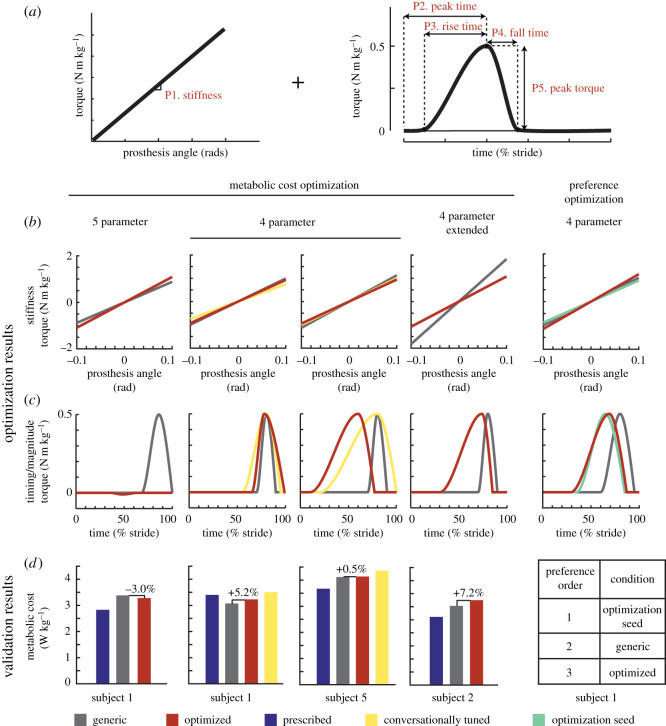
Human-in-the-loop optimization allows for individualized device control based on measured human performance. This technique has been used to produce large reductions in energy expenditure during walking with exoskeletons but has not yet been applied to prosthetic devices. In this series of case studies, we applied human-in-the-loop optimization to the control of an active ankle-foot prosthesis used by participants with unilateral transtibial amputation. We optimized the parameters of five control architectures that captured aspects of successful exoskeletons and commercial prostheses, but none resulted in significantly lower metabolic rate than generic control. In one control architecture, we increased the exposure time per condition by a factor of five, but the optimized controller still resulted in higher metabolic rate. Finally, we optimized for self-reported comfort instead of metabolic rate, but the resulting controller was not preferred. There are several reasons why human-in-the-loop optimization may have failed for people with amputation. Control architecture is an unlikely cause given the variety of controllers tested. The lack of effect likely relates to changes in motor adaptation, learning, or objectives in people with amputation. Future work should investigate these potential causes to determine whether human-in-the-loop optimization for prostheses could be successful.
人在回路优化允许基于测量的人体表现进行个性化设备控制。这项技术已被用于在使用外骨骼行走时大幅降低能量消耗,但尚未应用于假肢设备。在这一系列案例研究中,我们将人在回路优化应用于单侧胫骨截肢参与者使用的主动踝足假肢的控制。我们优化了五种控制架构的参数,这些架构捕捉了成功的外骨骼和商业假肢的各个方面,但没有一种架构能使代谢率显著低于通用控制。在一种控制架构中,我们将每种条件下的暴露时间增加了五倍,但优化后的控制器仍导致更高的代谢率。最后,我们针对自我报告的舒适度而非代谢率进行优化,但最终得到的控制器并不受欢迎。对于截肢者来说,人在回路优化可能失败有几个原因。考虑到测试的控制器种类繁多,控制架构不太可能是原因。缺乏效果可能与截肢者运动适应、学习或目标的变化有关。未来的工作应该研究这些潜在原因,以确定假肢的人在回路优化是否能够成功。