Collins Justin W, Ghazi Ahmed, Stoyanov Danail, Hung Andrew, Coleman Mark, Cecil Tom, Ericsson Anders, Anvari Mehran, Wang Yulun, Beaulieu Yanick, Haram Nadine, Sridhar Ashwin, Marescaux Jacques, Diana Michele, Marcus Hani J, Levy Jeffrey, Dasgupta Prokar, Stefanidis Dimitrios, Martino Martin, Feins Richard, Patel Vipul, Slack Mark, Satava Richard M, Kelly John D
Division of Surgery and Interventional Science, Research Department of Targeted Intervention, University College London, London, UK.
Department of Uro-Oncology, University College London Hospital, London, UK.
Eur Urol Open Sci. 2020 Nov 6;22:23-33. doi: 10.1016/j.euros.2020.09.005. eCollection 2020 Dec.
The role of robot-assisted surgery continues to expand at a time when trainers and proctors have travel restrictions during the coronavirus disease 2019 (COVID-19) pandemic.
To provide guidance on setting up and running an optimised telementoring service that can be integrated into current validated curricula. We define a standardised approach to training candidates in skill acquisition via telepresence technologies. We aim to describe an approach based on the current evidence and available technologies, and define the key elements within optimised telepresence services, by seeking consensus from an expert committee comprising key opinion leaders in training.
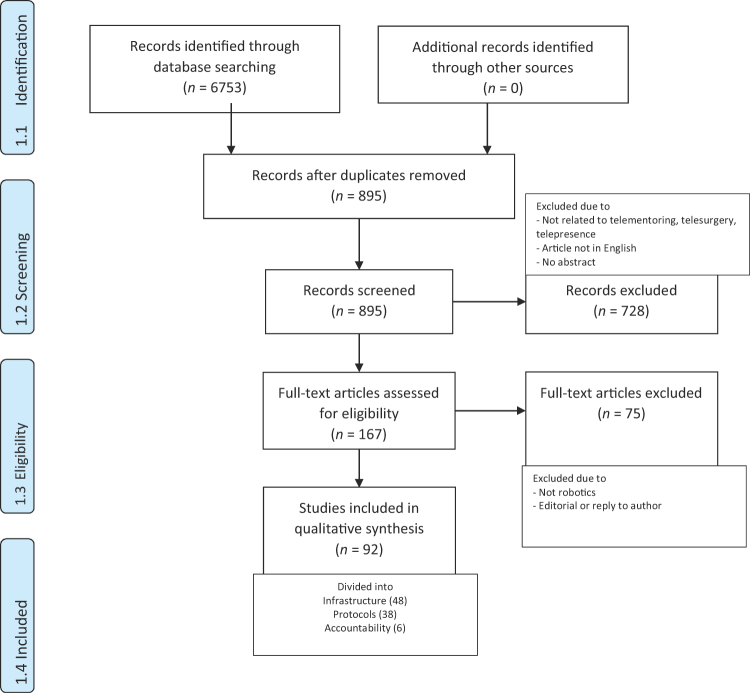
This project was carried out in phases: a systematic review of the current literature, a teleconference meeting, and then an initial survey were conducted based on the current evidence and expert opinion, and sent to the committee. Twenty-four experts in training, including clinicians, academics, and industry, contributed to the Delphi process. An accelerated Delphi process underwent three rounds and was completed within 72 h. Additions to the second- and third-round surveys were formulated based on the answers and comments from the previous rounds. Consensus opinion was defined as ≥80% agreement.
There was 100% consensus regarding an urgent need for international agreement on guidance for optimised telepresence. Consensus was reached in multiple areas, including (1) infrastructure and functionality; (2) definitions and terminology; (3) protocols for training, communication, and safety issues; and (4) accountability including ethical and legal issues. The resulting formulated guidance showed good internal consistency among experts, with a Cronbach alpha of 0.90.
Using the Delphi methodology, we achieved international consensus among experts for development and content validation of optimised telepresence services for robotic surgery training. This guidance lays the foundation for launching telepresence services in robotic surgery. This guidance will require further validation.
Owing to travel restrictions during the coronavirus disease 2019 (COVID-19) pandemic, development of remote training and support via telemedicine is becoming increasingly important. We report a key opinion leader consensus view on a standardised approach to telepresence.
在2019冠状病毒病(COVID-19)大流行期间,培训人员和监考人员受到出行限制,此时机器人辅助手术的作用仍在不断扩大。
提供有关建立和运行优化的远程指导服务的指导意见,该服务可整合到当前经过验证的课程中。我们定义了一种通过远程呈现技术培训候选人技能获取的标准化方法。我们旨在描述一种基于当前证据和可用技术的方法,并通过寻求由培训领域的关键意见领袖组成的专家委员会的共识,确定优化的远程呈现服务中的关键要素。
该项目分阶段进行:对当前文献进行系统综述,召开电话会议,然后根据当前证据和专家意见进行初步调查,并发送给委员会。包括临床医生、学者和行业人士在内的24名培训专家参与了德尔菲法。加速德尔菲法进行了三轮,并在72小时内完成。第二轮和第三轮调查的补充内容是根据上一轮的答案和评论制定的。共识意见定义为≥80%的一致同意。
对于迫切需要就优化远程呈现的指导意见达成国际协议,达成了100%的共识。在多个领域达成了共识,包括(1)基础设施和功能;(2)定义和术语;(3)培训、沟通和安全问题的协议;以及(4)包括伦理和法律问题在内的问责制。由此制定的指导意见在专家之间显示出良好的内部一致性,Cronbach阿尔法系数为0.90。
使用德尔菲法,我们在专家之间就用于机器人手术培训的优化远程呈现服务的开发和内容验证达成了国际共识。本指导意见为在机器人手术中推出远程呈现服务奠定了基础。本指导意见还需要进一步验证。
由于2019冠状病毒病(COVID-19)大流行期间的出行限制,通过远程医疗开展远程培训和支持变得越来越重要。我们报告了关于远程呈现标准化方法的关键意见领袖共识观点。