Bishop P J, Falisse A, De Groote F, Hutchinson J R
Structure and Motion Laboratory, Department of Comparative Biomedical Sciences, Royal Veterinary College, Hatfield, UK.
Geosciences Program, Queensland Museum, Brisbane, Australia.
Integr Org Biol. 2021 Apr 15;3(1):obab006. doi: 10.1093/iob/obab006. eCollection 2021.
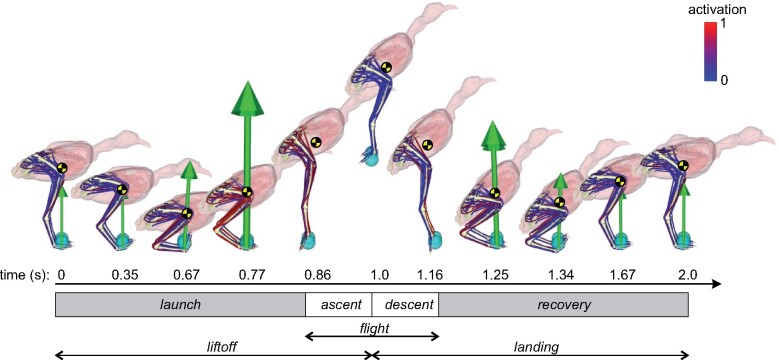
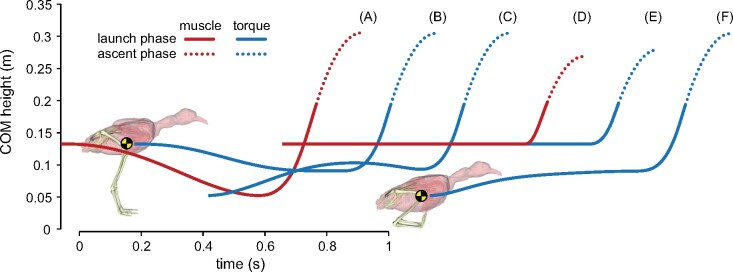
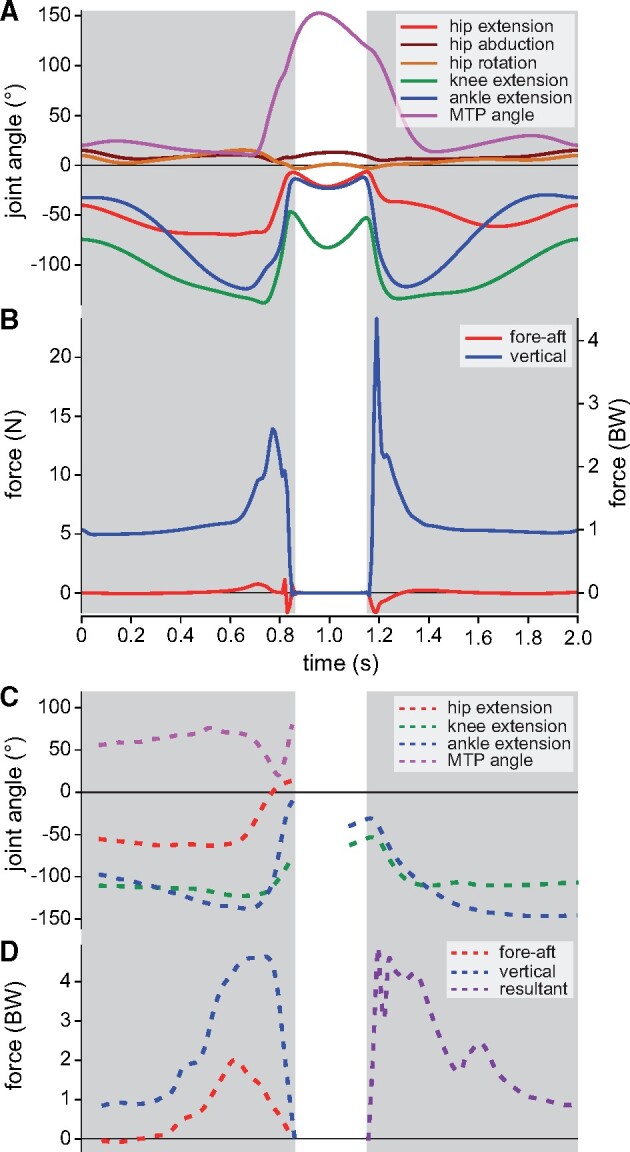
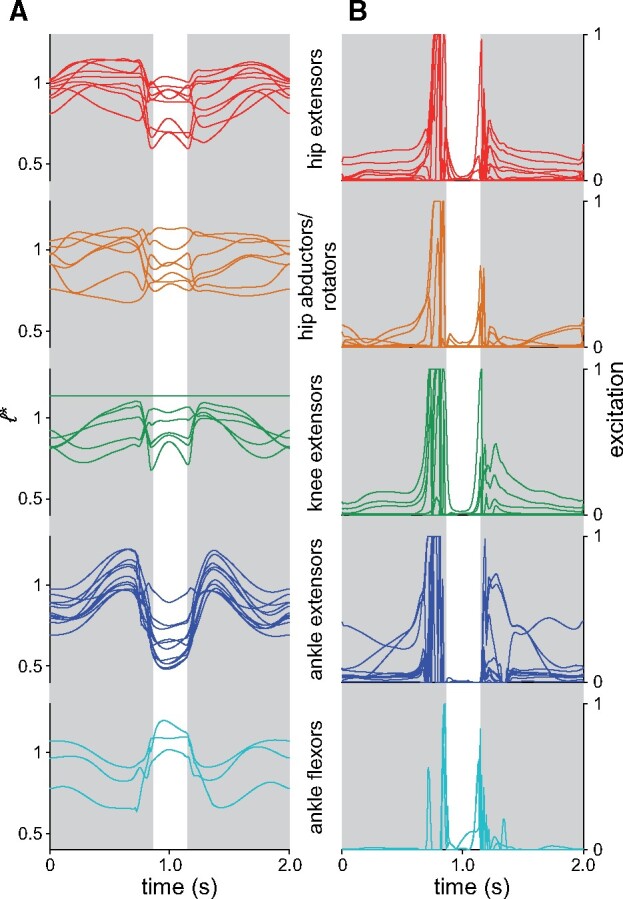
Jumping is a common, but demanding, behavior that many animals employ during everyday activity. In contrast to jump-specialists such as anurans and some primates, jumping biomechanics and the factors that influence performance remains little studied for generalized species that lack marked adaptations for jumping. Computational biomechanical modeling approaches offer a way of addressing this in a rigorous, mechanistic fashion. Here, optimal control theory and musculoskeletal modeling are integrated to generate predictive simulations of maximal height jumping in a small ground-dwelling bird, a tinamou. A three-dimensional musculoskeletal model with 36 actuators per leg is used, and direct collocation is employed to formulate a rapidly solvable optimal control problem involving both liftoff and landing phases. The resulting simulation raises the whole-body center of mass to over double its standing height, and key aspects of the simulated behavior qualitatively replicate empirical observations for other jumping birds. However, quantitative performance is lower, with reduced ground forces, jump heights, and muscle-tendon power. A pronounced countermovement maneuver is used during launch. The use of a countermovement is demonstrated to be critical to the achievement of greater jump heights, and this phenomenon may only need to exploit physical principles alone to be successful; amplification of muscle performance may not necessarily be a proximate reason for the use of this maneuver. Increasing muscle strength or contractile velocity above nominal values greatly improves jump performance, and interestingly has the greatest effect on more distal limb extensor muscles (i.e., those of the ankle), suggesting that the distal limb may be a critical link for jumping behavior. These results warrant a re-evaluation of previous inferences of jumping ability in some extinct species with foreshortened distal limb segments, such as dromaeosaurid dinosaurs. Sauter est un comportement commun, mais exigeant, que de nombreux animaux utilisent au cours de leurs activités quotidiennes. Contrairement aux spécialistes du saut tels que les anoures et certains primates, la biomécanique du saut et les facteurs qui influencent la performance restent peu étudiés pour les espèces généralisées qui n'ont pas d'adaptations marquées pour le saut. Les approches de modélisation biomécanique computationnelle offrent un moyen d'aborder cette question de manière rigoureuse et mécaniste. Ici, la théorie du contrôle optimal et la modélisation musculo-squelettique sont intégrées pour générer des simulations prédictives du saut en hauteur maximal chez un petit oiseau terrestre, le tinamou. Un modèle musculo-squelettique tridimensionnel avec 36 actionneurs par patte est utilisé, et une méthode numérique nommée "direct collocation" est employée pour formuler un problème de contrôle optimal rapidement résoluble impliquant les phases de décollage et d'atterrissage. La simulation qui en résulte élève le centre de masse du corps entier à plus du double de sa hauteur debout, et les aspects clés du comportement simulé reproduisent qualitativement les observations empiriques d'autres oiseaux sauteurs. Cependant, les performances quantitatives sont moindres, avec une réduction des forces au sol, des hauteurs de saut et de la puissance musculo-tendineuse. Une manœuvre de contre-mouvement prononcée est utilisée pendant le lancement. Il a été démontré que l'utilisation d'un contre-mouvement est essentielle à l'obtention de hauteurs de saut plus importantes, et il se peut que ce phénomène doive exploiter uniquement des principes physiques pour réussir; l'amplification de la performance musculaire n'est pas nécessairement une raison immédiate de l'utilisation de cette manœuvre. L'augmentation de la force musculaire ou de la vitesse de contraction au-dessus des valeurs nominales améliore grandement la performance de saut et, fait intéressant, a le plus grand effet sur les muscles extenseurs des membres plus distaux (c'est-à-dire ceux de la cheville), ce qui suggère que le membre distal peut être un lien critique pour le comportement de saut. Ces résultats justifient une réévaluation des déductions précédentes de la capacité de sauter chez certaines espèces éteintes avec des segments de membres distaux raccourcis, comme les dinosaures droméosauridés. Springen is een veel voorkomend, maar veeleisend, gedrag dat veel dieren toepassen tijdens hun dagelijkse bezigheden. In tegenstelling tot de springspecialisten zoals de anura en sommige primaten, is de biomechanica van het springen en de factoren die de prestaties beïnvloeden nog weinig bestudeerd voor algemene soorten die geen uitgesproken adaptaties voor het springen hebben. Computationele biomechanische modelbenaderingen bieden een manier om dit op een rigoureuze, mechanistische manier aan te pakken. Hier worden optimale controle theorie en musculoskeletale modellering geïntegreerd om voorspellende simulaties te genereren van maximale hoogtesprong bij een kleine grondbewonende vogel, een tinamou. Een driedimensionaal musculoskeletaal model met 36 actuatoren per poot wordt gebruikt, en directe collocatie wordt toegepast om een snel oplosbaar optimaal controleprobleem te formuleren dat zowel de opstijg-als de landingsfase omvat. De resulterende simulatie verhoogt het lichaamszwaartepunt tot meer dan het dubbele van de stahoogte, en belangrijke aspecten van het gesimuleerde gedrag komen kwalitatief overeen met empirische waarnemingen voor andere springende vogels. De kwantitatieve prestaties zijn echter minder, met verminderde grondkrachten, spronghoogtes en spierpeeskracht. Tijdens de lancering wordt een uitgesproken tegenbewegingsmanoeuvre gebruikt. Aangetoond is dat het gebruik van een tegenbeweging van cruciaal belang is voor het bereiken van grotere spronghoogten, en dit fenomeen hoeft alleen op fysische principes te berusten om succesvol te zijn; versterking van de spierprestaties hoeft niet noodzakelijk een proximate reden te zijn voor het gebruik van deze manoeuvre. Het verhogen van de spierkracht of van de contractiesnelheid boven de nominale waarden verbetert de sprongprestatie aanzienlijk, en heeft interessant genoeg het grootste effect op de meer distale extensoren van de ledematen (d.w.z. die van de enkel), wat suggereert dat de distale ledematen een kritieke schakel kunnen zijn voor het springgedrag. Deze resultaten rechtvaardigen een herevaluatie van eerdere conclusies over springvermogen bij sommige uitgestorven soorten met voorgekorte distale ledematen, zoals dromaeosauride dinosauriërs. Springen ist ein übliches jedoch anstrengendes Verhalten, das viele Tiere bei ihren täglichen Aktivitäten einsetzen. Im Gegensatz zu Springspezialisten, wie Fröschen und einigen Primaten, sind bei allgemeinen Arten, welche keine ausgeprägten Anpassung für Sprungverhalten aufweisen, die Biomechanik beim Springen und die Faktoren, welche die Leistungsfähigkeit beeinflussen, noch wenig untersucht. Computergestützte biomechanische Modellierungsverfahren bieten hier eine Möglichkeit, dies in einer gründlichen, mechanistischen Weise anzugehen. In dieser Arbeit werden die optimale Steuerungstheorie und Muskel-Skelett-Modellierung zusammen eingesetzt, um die maximale Sprunghöhe eines kleinen bodenlebenden Vogels, eines Perlsteisshuhns, zu simulieren und zu prognostizieren. Es wird ein dreidimensionales Muskel-Skelett-Modell mit 36 Aktuatoren pro Bein verwendet, und durch direkte Kollokation wird ein schnell lösbares optimales Steuerungsproblem formuliert, das sowohl die Abstoss- als auch die Landephase umfasst. Die daraus folgende Simulation bringt den Ganzkörperschwerpunkt auf mehr als das Doppelte seiner Standhöhe und entscheidende Aspekte des simulierten Verhaltens entsprechen qualitativ empirischen Beobachtungen für andere springende Vögel. Allerdings ist die quantitative Leistungsfähigkeit geringer, mit reduzierten Bodenkräften, Sprunghöhen und Muskel-Sehnen-Kräften. Beim Abstossen wird ein ausgeprägtes Gegenbewegungsmanöver durchgeführt. Die Durchführung einer Gegenbewegung ist nachweislich entscheidend für das Erreichen grösserer Sprunghöhen, wobei dieses Phänomen möglicherweise nur physikalische Prinzipien auszuschöpfen braucht, um erfolgreich zu sein. Die Verstärkung der Muskelleistung ist daher möglicherweise nicht zwingend ein unmittelbarer Grund für die Verwendung dieses Manövers. Eine Erhöhung der Muskelkraft oder der Kontraktionsgeschwindigkeit über die Nominalwerte hinaus führt zu einer erheblichen Zunahme der Sprungleistung und hat interessanterweise den grössten Effekt bei den weiter distal gelegenen Streckmuskeln der Beine (d.h. bei denjenigen des Sprunggelenks), was darauf hindeutet, dass die distale Gliedmasse ein entscheidendes Element für das Sprungverhalten sein könnte. Diese Ergebnisse geben Anlass zur Überprüfung früherer Schlussfolgerungen hinsichtlich der Sprungfähigkeit einiger ausgestorbener Arten mit verkürzten distalen Gliedmassen, wie beispielsweise bei dromaeosauriden Dinosauriern.
跳跃是许多动物日常活动中常见但要求较高的行为。与诸如无尾两栖类动物和一些灵长类等跳跃专家不同,对于缺乏明显跳跃适应性的广义物种,跳跃生物力学以及影响其表现的因素仍鲜少被研究。计算生物力学建模方法提供了一种以严谨、机械的方式解决此问题的途径。在此,最优控制理论与肌肉骨骼建模相结合,以生成一种小型地栖鸟类(一种䳍)最大高度跳跃的预测模拟。使用了一个每条腿有36个驱动器的三维肌肉骨骼模型,并采用直接配置法来制定一个涉及起飞和着陆阶段的快速可解最优控制问题。所得模拟将全身质心提升至超过其站立高度的两倍,并且模拟行为的关键方面在质量上重现了其他跳跃鸟类的实证观察结果。然而,定量表现较低,地面力、跳跃高度和肌腱力量均有所降低。在起跳过程中使用了明显的反向运动动作。事实证明,反向运动的使用对于实现更高的跳跃高度至关重要,并且这种现象可能仅需利用物理原理就能成功;肌肉表现的增强不一定是使用此动作的直接原因。将肌肉力量或收缩速度提高到标称值以上可极大地改善跳跃表现,有趣的是,对更远端的肢体伸肌(即脚踝的伸肌)影响最大,这表明远端肢体可能是跳跃行为的关键环节。这些结果促使人们重新评估先前对一些远端肢体节段缩短的已灭绝物种(如驰龙科恐龙)跳跃能力的推断。 跳跃是许多动物日常活动中常见但要求较高的行为。与诸如无尾两栖类动物和一些灵长类等跳跃专家不同,对于缺乏明显跳跃适应性的广义物种,跳跃生物力学以及影响其表现的因素仍鲜少被研究。计算生物力学建模方法提供了一种以严谨、机械的方式解决此问题的途径。在此,最优控制理论与肌肉骨骼建模相结合,以生成一种小型地栖鸟类(一种䳍)最大高度跳跃的预测模拟。使用了一个每条腿有36个驱动器的三维肌肉骨骼模型,并采用直接配置法来制定一个涉及起飞和着陆阶段的快速可解最优控制问题。所得模拟将全身质心提升至超过其站立高度的两倍,并且模拟行为的关键方面在质量上重现了其他跳跃鸟类的实证观察结果。然而,定量表现较低,地面力、跳跃高度和肌腱力量均有所降低。在起跳过程中使用了明显的反向运动动作。事实证明,反向运动的使用对于实现更高的跳跃高度至关重要,并且这种现象可能仅需利用物理原理就能成功;肌肉表现的增强不一定是使用此动作的直接原因。将肌肉力量或收缩速度提高到标称值以上可极大地改善跳跃表现,有趣的是,对更远端的肢体伸肌(即脚踝的伸肌)影响最大,这表明远端肢体可能是跳跃行为的关键环节。这些结果促使人们重新评估先前对一些远端肢体节段缩短的已灭绝物种(如驰龙科恐龙)跳跃能力的推断。 跳跃是一种常见但要求很高的行为,许多动物在日常活动中都会表现出来。与青蛙和一些灵长类等跳跃专家不同,对于没有明显跳跃适应特征的广义物种,跳跃生物力学和影响其性能的因素研究较少。计算生物力学建模方法提供了一种以严谨、机械的方式解决这个问题的途径。在这里,最优控制理论和肌肉骨骼建模相结合,以生成对一种小型地栖鸟类——一种䳍——最大高度跳跃的预测模拟。使用了一个每条腿有36个驱动器的三维肌肉骨骼模型,并采用直接配置法来制定一个快速可解的最优控制问题,该问题涉及起飞和着陆阶段。由此产生的模拟将全身质心提高到超过其站立高度的两倍,模拟行为的关键方面在质量上与其他跳跃鸟类的实证观察结果相符。然而,定量性能较低,地面力、跳跃高度和肌腱力量都有所降低。在发射过程中使用了明显的反向运动动作。事实证明,使用反向运动对于实现更高的跳跃高度至关重要,而且这种现象可能只需要利用物理原理就能成功;肌肉性能的增强不一定是使用这种动作的直接原因提升肌肉力量或收缩速度使其高于标称值会大大提高跳跃性能很有趣的是对更远端的肢体伸肌(即脚踝的伸肌)影响最大这表明远端肢体可能是跳跃行为的关键环节这些结果值得重新评估以前对一些远端肢体节段缩短的灭绝物种(如驰龙科恐龙)跳跃能力的推断 跳跃是一种常见但要求很高的行为,许多动物在日常活动中都会表现出来。与青蛙和一些灵长类等跳跃专家不同,对于没有明显跳跃适应特征的广义物种,跳跃生物力学和影响其性能的因素研究较少。计算生物力学建模方法提供了一种以严谨、机械的方式解决这个问题的途径。在这里,最优控制理论和肌肉骨骼建模相结合,以生成对一种小型地栖鸟类——一种䳍——最大高度跳跃的预测模拟。使用了一个每条腿有36个驱动器的三维肌肉骨骼模型,并采用直接配置法来制定一个快速可解的最优控制问题,该问题涉及起飞和着陆阶段。由此产生的模拟将全身质心提高到超过其站立高度的两倍,模拟行为的关键方面在质量上与其他跳跃鸟类的实证观察结果相符。然而,定量性能较低,地面力、跳跃高度和肌腱力量都有所降低。在发射过程中使用了明显的反向运动动作。事实证明,使用反向运动对于实现更高的跳跃高度至关重要,而且这种现象可能只需要利用物理原理就能成功;肌肉性能的增强不一定是使用这种动作的直接原因提升肌肉力量或收缩速度使其高于标称值会大大提高跳跃性能很有趣的是对更远端的肢体伸肌(即脚踝的伸肌)影响最大这表明远端肢体可能是跳跃行为的关键环节这些结果值得重新评估以前对一些远端肢体节段缩短的灭绝物种(如驰龙科恐龙)跳跃能力的推断 跳跃是一种常见但要求颇高的行为,许多动物在日常活动中都会展现。与诸如蛙类和某些灵长类等跳跃专家不同,对于那些缺乏显著跳跃适应性的广义物种而言,跳跃生物力学以及影响其表现的因素仍鲜少得到研究。计算生物力学建模方法提供了一种以严谨、机械的方式来处理此问题的途径。在此,最优控制理论与肌肉骨骼建模相结合,以生成对一种小型地栖鸟类(一种䳍)最大高度跳跃情况的预测模拟。使用了一个每条腿配备36个驱动器的三维肌肉骨骼模型,并运用直接配置法来构建一个快速可解的最优控制问题,该问题涵盖了起飞和着陆阶段。所得到的模拟将全身质心提升至超过其站立高度的两倍,并且模拟行为的关键方面在质量上与其他跳跃鸟类的实证观测结果相吻合。然而,定量表现较低,地面力、跳跃高度以及肌腱力量均有所下降。在起跳过程中会运用一种明显的反向运动动作。事实证明,反向运动的运用对于达成更高的跳跃高度至关重要,而且这种现象或许仅需借助物理原理便能成功;肌肉表现的增强不一定是采用此动作的直接缘由。将肌肉力量或收缩速度提升至标称值以上会极大地改善跳跃表现,有趣的是,对更远端的肢体伸肌(即脚踝处的伸肌)影响最为显著,这表明远端肢体可能是跳跃行为的关键纽带。这些结果促使人们对先前关于一些远端肢体节段缩短的已灭绝物种(如驰龙科恐龙)跳跃能力的推断进行重新评估