Department of Geoinformatic Engineering, Inha University, Incheon 22212, Korea.
Department of Mechanical Engineering, College of Engineering, Korea Advanced Institute of Science and Technology, Daejeon 34141, Korea.
Sensors (Basel). 2021 Nov 19;21(22):7715. doi: 10.3390/s21227715.
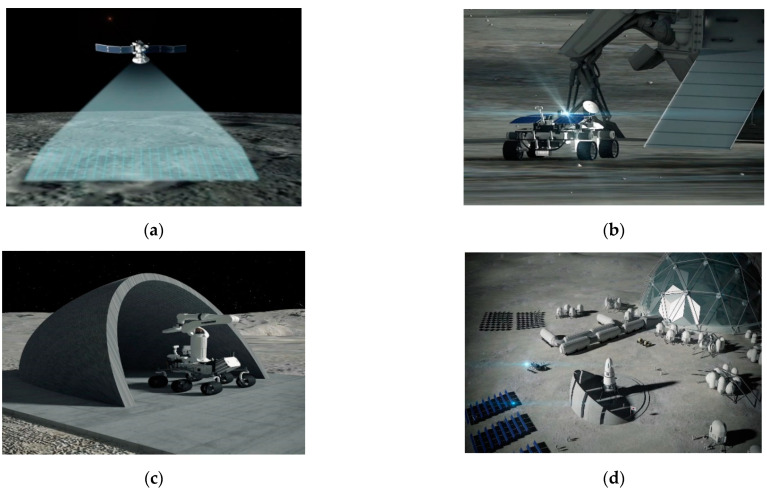
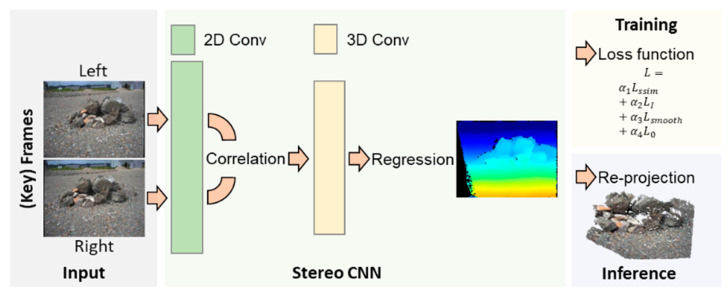
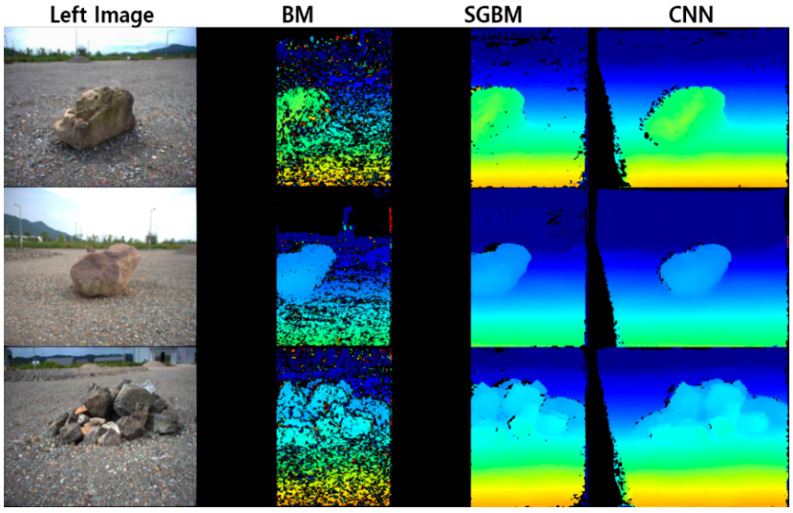
With the recent discovery of water-ice and lava tubes on the Moon and Mars along with the development of in-situ resource utilization (ISRU) technology, the recent planetary exploration has focused on rover (or lander)-based surface missions toward the base construction for long-term human exploration and habitation. However, a 3D terrain map, mostly based on orbiters' terrain images, has insufficient resolutions for construction purposes. In this regard, this paper introduces the visual simultaneous localization and mapping (SLAM)-based robotic mapping method employing a stereo camera system on a rover. In the method, S-PTAM is utilized as a base framework, with which the disparity map from the self-supervised deep learning is combined to enhance the mapping capabilities under homogeneous and unstructured environments of planetary terrains. The overall performance of the proposed method was evaluated in the emulated planetary terrain and validated with potential results.
随着最近在月球和火星上发现水冰和熔岩管,以及原位资源利用 (ISRU) 技术的发展,最近的行星探测重点是基于漫游者(或着陆器)的表面任务,朝着长期人类探索和居住的基地建设方向发展。然而,主要基于轨道飞行器地形图像的三维地形地图对于建筑目的来说分辨率不足。在这方面,本文介绍了一种基于视觉同时定位与制图 (SLAM) 的机器人制图方法,该方法在漫游者上使用立体相机系统。在该方法中,S-PTAM 被用作基础框架,通过该框架结合来自自监督深度学习的视差图,可以增强行星地形的同质和非结构化环境下的制图能力。在所提出的方法的整体性能在模拟行星地形中进行了评估,并验证了潜在的结果。