Institute of Cognitive Neuroscience, University College London, London, United Kingdom.
East London NHS Foundation Trust, London, United Kingdom.
J Neural Eng. 2022 Jan 24;19(1):016006. doi: 10.1088/1741-2552/ac47d9.
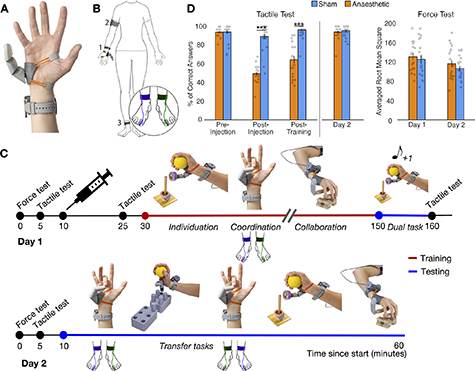
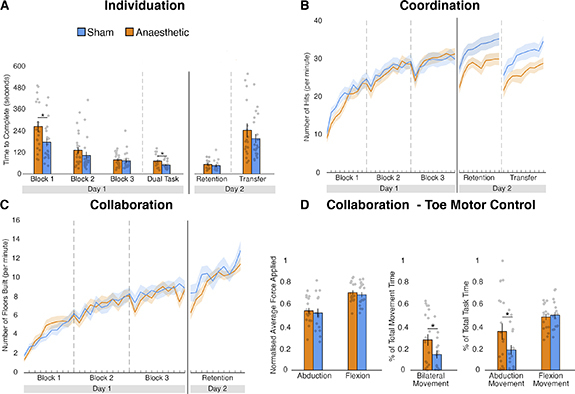
Considerable resources are being invested to enhance the control and usability of artificial limbs through the delivery of unnatural forms of somatosensory feedback. Here, we investigated whether intrinsic somatosensory information from the body part(s) remotely controlling an artificial limb can be leveraged by the motor system to support control and skill learning.We used local anaesthetic to attenuate somatosensory inputs to the big toes while participants learned to operate through pressure sensors a toe-controlled and hand-worn robotic extra finger. Motor learning outcomes were compared against a control group who received sham anaesthetic and quantified in three different task scenarios: while operating in isolation from, in synchronous coordination, and collaboration with, the biological fingers.Both groups were able to learn to operate the robotic extra finger, presumably due to abundance of visual feedback and other relevant sensory cues. Importantly, the availability of displaced somatosensory cues from the distal bodily controllers facilitated the acquisition of isolated robotic finger movements, the retention and transfer of synchronous hand-robot coordination skills, and performance under cognitive load. Motor performance was not impaired by toes anaesthesia when tasks involved close collaboration with the biological fingers, indicating that the motor system can close the sensory feedback gap by dynamically integrating task-intrinsic somatosensory signals from multiple, and even distal, body-parts.Together, our findings demonstrate that there are multiple natural avenues to provide intrinsic surrogate somatosensory information to support motor control of an artificial body part, beyond artificial stimulation.
人们正在投入大量资源,通过提供非自然形式的体感反馈来增强对假肢的控制和可用性。在这里,我们研究了远程控制假肢的身体部位的固有体感信息是否可以被运动系统利用,以支持控制和技能学习。我们使用局部麻醉来减弱大脚趾的体感输入,同时让参与者通过压力传感器学习操作脚趾控制和手戴的机器人额外手指。将运动学习结果与接受假麻醉的对照组进行比较,并在三个不同的任务场景中进行量化:在与生物手指隔离操作、同步协调操作和协作操作时。两个组都能够学习操作机器人的额外手指,这可能是由于丰富的视觉反馈和其他相关感觉提示。重要的是,从远端身体控制器提供的替代体感提示有助于获取孤立的机器人手指运动、保留和转移同步手-机器人协调技能以及在认知负荷下的表现。当任务涉及与生物手指紧密协作时,脚趾麻醉并不会影响运动表现,这表明运动系统可以通过动态整合来自多个甚至远端身体部位的任务内在体感信号来弥合感觉反馈差距。
综上所述,我们的研究结果表明,除了人工刺激之外,还有多种自然途径可以提供内在替代体感信息,以支持对人工身体部位的运动控制。