Hsu Bing-Hung, Liu Heng-Wei, Lee Kha-Liang, Lin Ming-Chin, Chen Gao, Yu Jang, Chen Chiao-Ling, Su I-Chang, Lin Chien-Min
Department of Neurosurgery, Shuang Ho Hospital, Taipei Medical University, New Taipei City, Taiwan.
Taipei Neuroscience Institute, Taipei Medical University, Taipei, Taiwan.
Neurospine. 2022 Jun;19(2):367-375. doi: 10.14245/ns.2143126.563. Epub 2022 May 12.
The study investigated our institutional learning curve for the ROSA ONE spine system (ROSA) based on ROSA usage time.
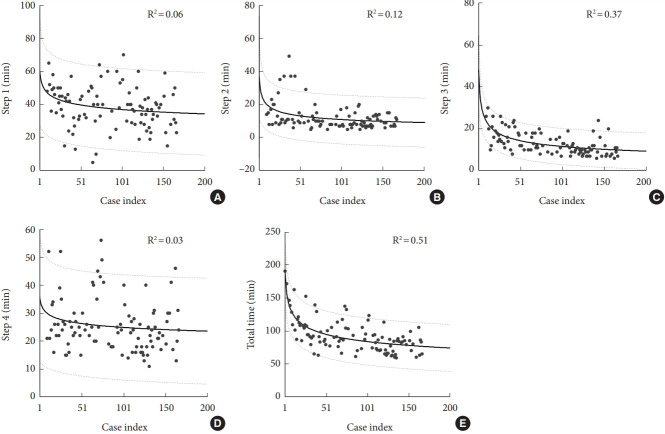
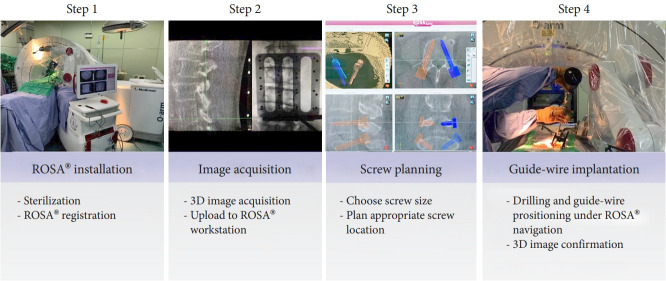
ROSA was designed to provide high accuracy for spinal pedicle screw placement through a built-in tracking technique. This study was conducted from November 2018 to January 2021. The time taken to complete each step of the robotic workflow was recorded. Patient demographics, comorbidities, surgical indications, and number of screw placements were examined in subgroup analysis. The Curve Fitting-General package (a part of NCSS 2021 software) was used to fit a mathematical model to the learning curve. Patient demographics, imaging data, and surgical time were reviewed retrospectively.
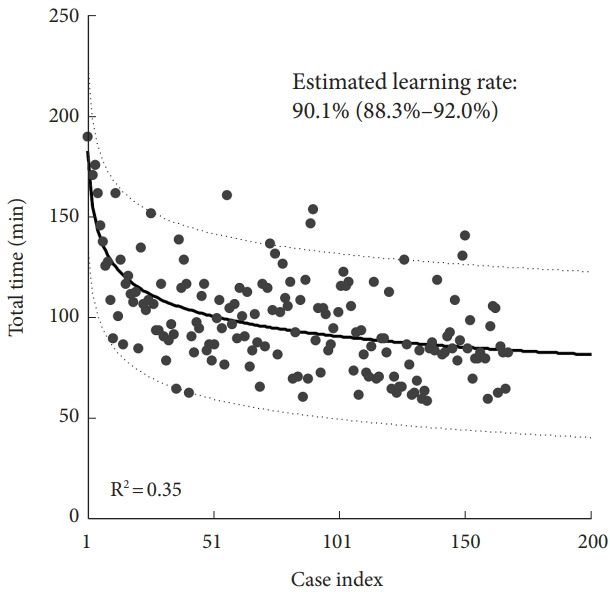
A total of 167 patients who had undergone surgery were included. The mean total ROSA usage time was 107.1 ± 27.3 minutes. The estimated learning rate was 90.4%, and the largest slope change occurred close to the time of the 20th surgery. The observed overall learning trend in the 4-screw group could be attributed to screw planning. The presence of scoliosis (p = 0.73) or spondylolisthesis (p = 0.70) did not significantly influence the mean total time (TT) for all patients; however, the mean TT differed significantly (p < 0.01) among subgroups stratified by body mass index, screw number placement, and thoracic spine involvement.
To the best of our knowledge, this is the first study to examine the learning curve for the various crucial steps of ROSA-guided pedicle screw placement. The indicative learning curve involved 20 patients who had undergone surgery.
本研究基于ROSA ONE脊柱系统(ROSA)的使用时间,调查了我们机构的学习曲线。
ROSA旨在通过内置跟踪技术为脊柱椎弓根螺钉置入提供高精度。本研究于2018年11月至2021年1月进行。记录完成机器人工作流程每个步骤所需的时间。在亚组分析中检查了患者的人口统计学特征、合并症、手术指征和螺钉置入数量。使用曲线拟合通用软件包(NCSS 2021软件的一部分)对学习曲线进行数学模型拟合。对患者的人口统计学特征、影像数据和手术时间进行回顾性分析。
共纳入167例接受手术的患者。ROSA的平均总使用时间为107.1±27.3分钟。估计学习率为90.4%,最大斜率变化发生在第20次手术时。在4螺钉组中观察到的总体学习趋势可归因于螺钉规划。脊柱侧弯(p = 0.73)或椎体滑脱(p = 0.70)的存在对所有患者的平均总时间(TT)没有显著影响;然而,按体重指数、螺钉置入数量和胸椎受累情况分层的亚组之间的平均TT差异显著(p < 0.01)。
据我们所知,这是第一项研究ROSA引导下椎弓根螺钉置入各个关键步骤学习曲线的研究。指示性学习曲线涉及20例接受手术的患者。