Interventional Oncology-Microinvasive Therapy (SIP), Department of Radiology, Medical University Innsbruck, Anichstr. 35, 6020, Innsbruck, Austria.
Eur Radiol. 2022 Oct;32(10):6769-6776. doi: 10.1007/s00330-022-08915-z. Epub 2022 Jun 9.
To evaluate the targeting accuracy of stereotactic punctures based on a hybrid robotic device in combination with optical tracking-a phantom study.
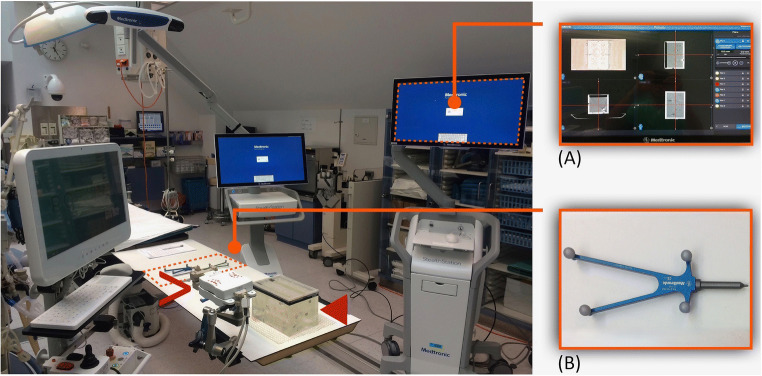
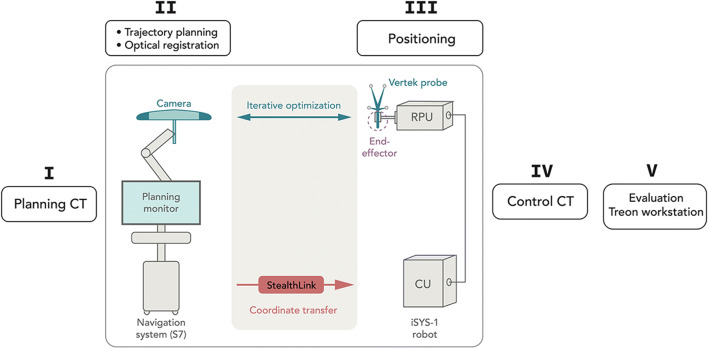
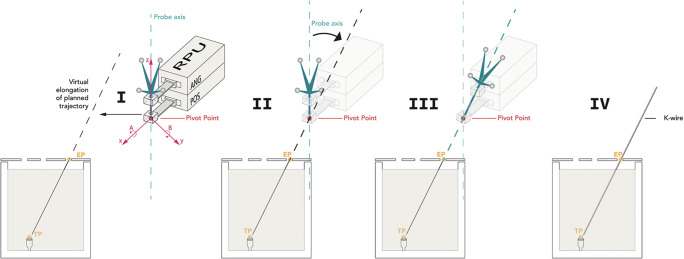
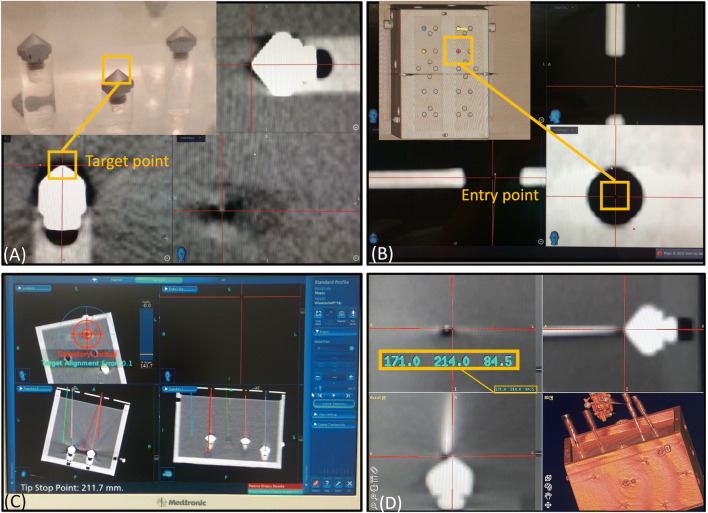
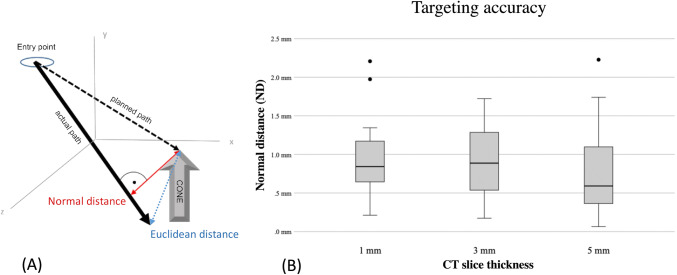
CT data sets of a gelatin-filled plexiglass phantom with 1-, 3-, and 5-mm slice thickness were acquired. An optical navigation device served for planning of a total of 150 needle trajectories. All punctures were carried out semi-automatically with help of the trackable iSYS-1 robotic device. Conically shaped targets inside the phantom were punctured using Kirschner wires. Up to 8 K-wires were positioned sequentially based on the same planning CT and placement accuracy was assessed by taking control CTs and measuring the Euclidean (ED) and normal distances (NDs) between the wire and the entry and target point.
Using the StealthStation S7, the accomplished mean ND at the target for the 1-mm, 3-mm, and 5-mm slice thickness was 0.89 mm (SD ± 0.42), 0.93 mm (SD ± 0.45), and 0.73 mm (SD ± 0.50), respectively. The corresponding mean ED was 1.61 mm (SD ± 0.36), 2.04 mm (SD ± 0.59), and 1.76 mm (SD ± 0.45). The mean duration of the total procedure was 27.9 min, including image acquisition, trajectory planning, registration, placement of 8 wires, and the control-CT.
The optically tracked iSYS-1 robot allows for precise punctures in a phantom. The StealthStation S7 provided acceptable results and may be helpful for interventions in difficult anatomical regions and for those requiring complex multi-angle trajectories. In combination with our optical navigation tool, the trackable robot unit allows to cover a large treatment field and the compact design facilitates placement of needle-like instruments.
• The use of a robotic targeting device in combination with optical tracking (hybrid system) allows for accurate placement of needle-like instruments without repeated control imaging. • The compact robotic positioning unit in combination with a camera for optical tracking facilitates sequential placement of multiple K-wires in a large treatment volume.
评估基于混合机器人设备结合光学跟踪的立体定向穿刺的靶向准确性-一项体模研究。
获取具有 1、3 和 5mm 切片厚度的明胶填充有机玻璃体模的 CT 数据集。光学导航设备用于总共规划 150 条针道。所有穿刺均在可跟踪的 iSYS-1 机器人设备的帮助下半自动进行。使用克氏针在体模内穿刺锥形靶标。根据相同的规划 CT,最多可以顺序放置 8 根 K 线,并通过拍摄控制 CT 并测量 K 线与进入点和靶点之间的欧几里得(ED)和法向距离(ND)来评估放置精度。
使用 StealthStation S7,在 1mm、3mm 和 5mm 切片厚度下,目标处的平均 ND 分别为 0.89mm(SD±0.42)、0.93mm(SD±0.45)和 0.73mm(SD±0.50)。相应的平均 ED 分别为 1.61mm(SD±0.36)、2.04mm(SD±0.59)和 1.76mm(SD±0.45)。总手术过程的平均持续时间为 27.9 分钟,包括图像采集、轨迹规划、注册、放置 8 根 K 线和控制 CT。
光学跟踪的 iSYS-1 机器人可实现体模内的精确穿刺。StealthStation S7 提供了可接受的结果,可能有助于在困难的解剖区域和需要复杂多角度轨迹的情况下进行干预。与我们的光学导航工具相结合,可跟踪的机器人单元允许覆盖较大的治疗区域,紧凑的设计便于放置针状器械。
机器人靶向装置与光学跟踪(混合系统)的结合使用可实现无需重复控制成像的针状器械的精确放置。
结合光学跟踪的紧凑型机器人定位单元和摄像头有利于在大治疗体积中顺序放置多个 K 线。