Future Energy and Innovation Laboratory, Central European Institute of Technology, Brno University of Technology, Purkyňova 123, 61200, Brno, Czech Republic.
Center for Advanced Functional Nanorobots, Department of Inorganic Chemistry, Faculty of Chemical Technology, University of Chemistry and Technology Prague, Technická 5, 166 28, Prague, Czech Republic.
Nat Commun. 2022 Jun 22;13(1):3573. doi: 10.1038/s41467-022-31161-2.
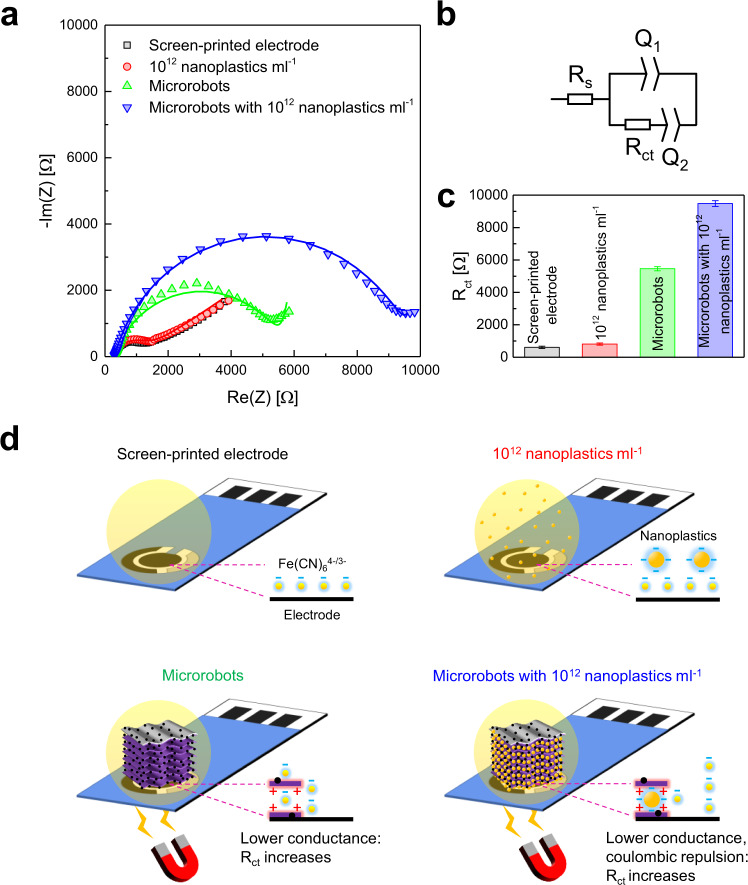
Nanoplastic pollution, the final product of plastic waste fragmentation in the environment, represents an increasing concern for the scientific community due to the easier diffusion and higher hazard associated with their small sizes. Therefore, there is a pressing demand for effective strategies to quantify and remove nanoplastics in wastewater. This work presents the "on-the-fly" capture of nanoplastics in the three-dimensional (3D) space by multifunctional MXene-derived oxide microrobots and their further detection. A thermal annealing process is used to convert TiCT MXene into photocatalytic multi-layered TiO, followed by the deposition of a Pt layer and the decoration with magnetic γ-FeO nanoparticles. The MXene-derived γ-FeO/Pt/TiO microrobots show negative photogravitaxis, resulting in a powerful fuel-free motion with six degrees of freedom under light irradiation. Owing to the unique combination of self-propulsion and programmable Zeta potential, the microrobots can quickly attract and trap nanoplastics on their surface, including the slits between multi-layer stacks, allowing their magnetic collection. Utilized as self-motile preconcentration platforms, they enable nanoplastics' electrochemical detection using low-cost and portable electrodes. This proof-of-concept study paves the way toward the "on-site" screening of nanoplastics in water and its successive remediation.
纳米塑料污染是塑料废弃物在环境中碎裂的最终产物,由于其较小尺寸更容易扩散和危害更高,因此引起了科学界的越来越多的关注。因此,迫切需要有效的策略来量化和去除废水中的纳米塑料。本工作提出了通过多功能 MXene 衍生氧化物微机器人在三维(3D)空间中“实时”捕获纳米塑料及其进一步检测的方法。通过热退火过程将 TiCT MXene 转化为光催化多层 TiO2,然后沉积 Pt 层并修饰磁性 γ-FeO 纳米粒子。MXene 衍生的 γ-FeO/Pt/TiO 微机器人表现出负光向性,从而在光照下产生无需燃料的六自由度强力运动。由于自推进和可编程 Zeta 电位的独特组合,微机器人可以快速吸引和捕获其表面上的纳米塑料,包括多层堆栈之间的狭缝,从而可以进行磁性收集。作为自驱动的预浓缩平台,它们可以使用低成本和便携式电极实现纳米塑料的电化学检测。这项概念验证研究为在现场筛选水中的纳米塑料及其后续修复铺平了道路。