Assistive Robotics and Interactive Exosuits (ARIES) Laboratory, Institute of Computer Engineering (ZITI), Heidelberg University, 69120 Heidelberg, Germany.
Sensors (Basel). 2022 Jul 6;22(14):5069. doi: 10.3390/s22145069.
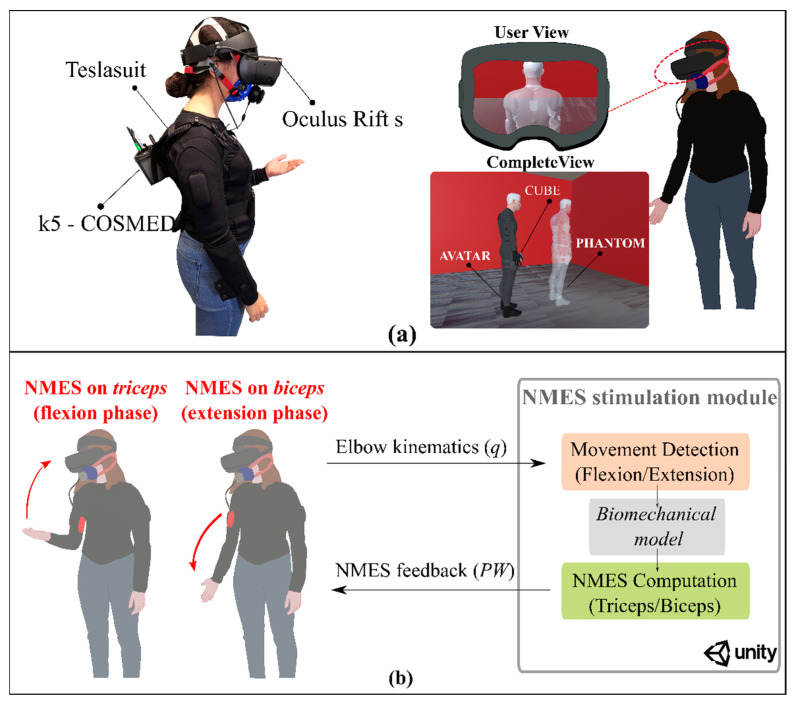
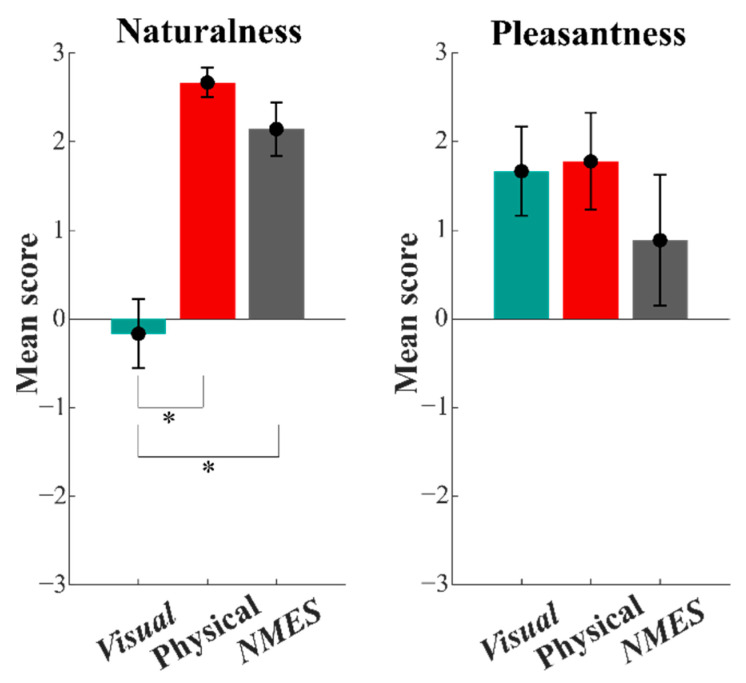
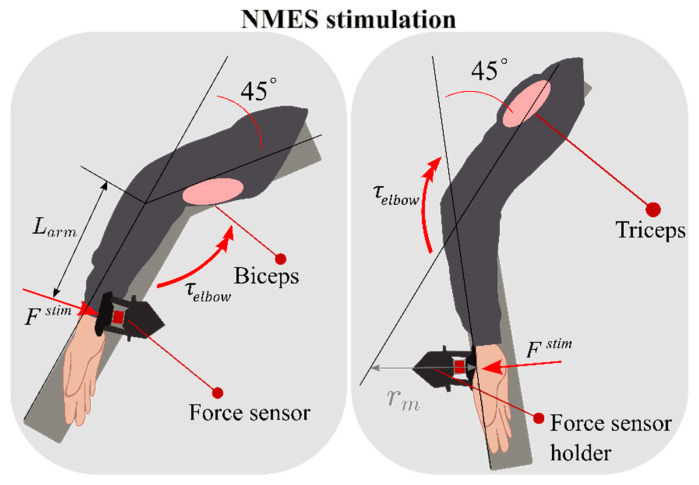
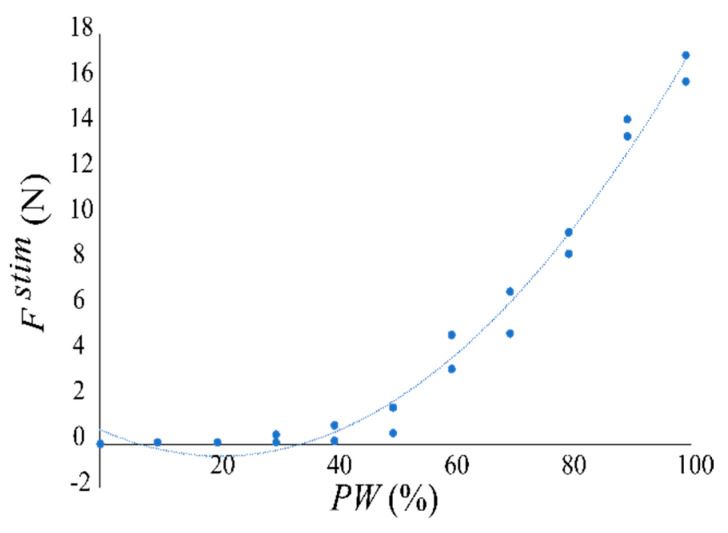
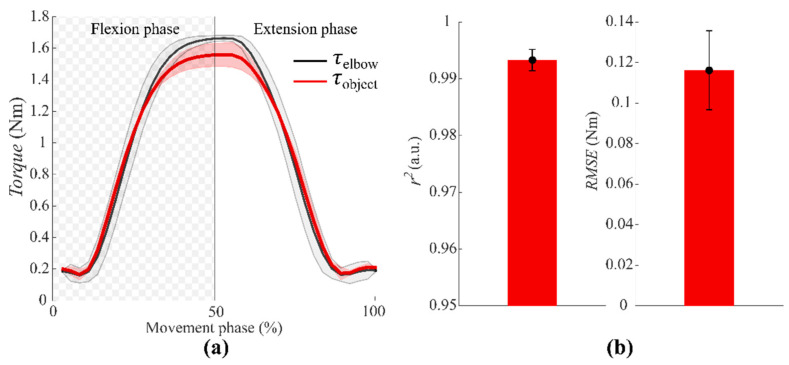
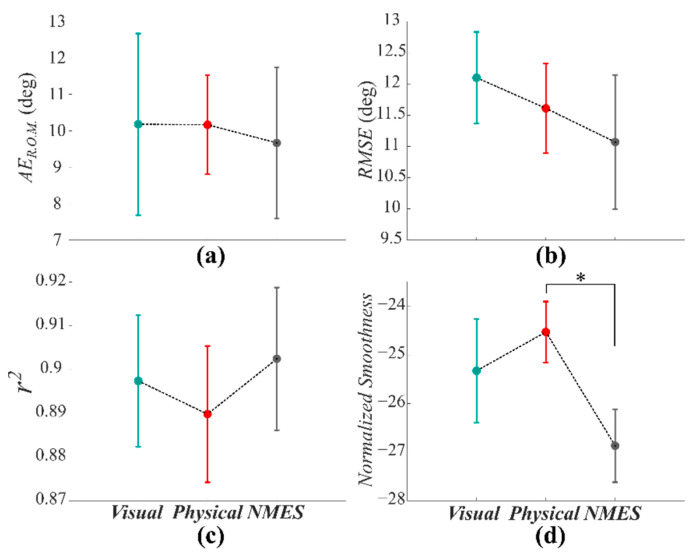
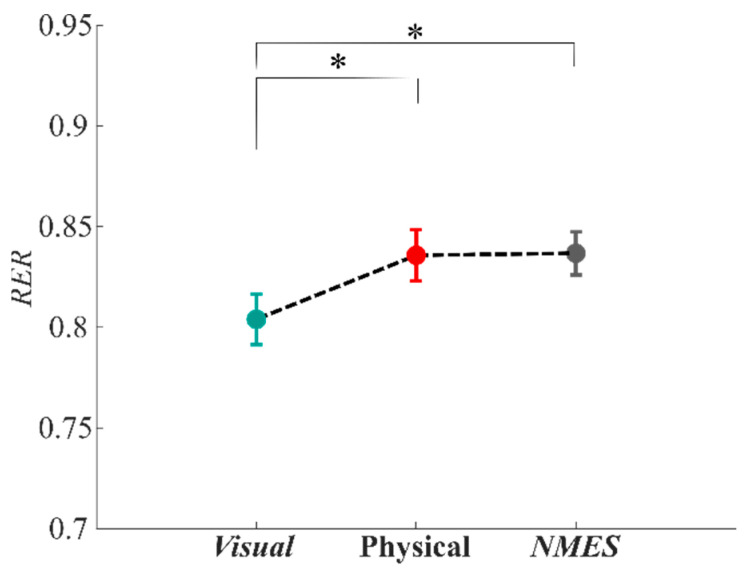
Haptic feedback is the sensory modality to enhance the so-called "immersion", meant as the extent to which senses are engaged by the mediated environment during virtual reality applications. However, it can be challenging to meet this requirement using conventional robotic design approaches that rely on rigid mechanical systems with limited workspace and bandwidth. An alternative solution can be seen in the adoption of lightweight wearable systems equipped with Neuromuscular Electrical Stimulation (NMES): in fact, NMES offers a wide range of different forces and qualities of haptic feedback. In this study, we present an experimental setup able to enrich the virtual reality experience by employing NMES to create in the antagonists' muscles the haptic sensation of being loaded. We developed a subject-specific biomechanical model that estimated elbow torque during object lifting to deliver suitable electrical muscle stimulations. We experimentally tested our system by exploring the differences between the implemented NMES-based haptic feedback ( condition), a physical lifted object ( condition), and a condition without haptic feedback ( condition) in terms of kinematic response, metabolic effort, and participants' perception of fatigue. Our results showed that both in terms of metabolic consumption and user fatigue perception, the condition with electrical stimulation and the condition with the real weight differed significantly from the condition without any load: the implemented feedback was able to faithfully reproduce interactions with objects, suggesting its possible application in different areas such as gaming, work risk assessment simulation, and education.
触觉反馈是一种增强所谓“沉浸感”的感觉模式,指的是在虚拟现实应用中,感官被中介环境所吸引的程度。然而,使用传统的机器人设计方法,依靠刚性机械系统和有限的工作空间和带宽,可能难以满足这一要求。一种替代解决方案可以采用配备神经肌肉电刺激 (NMES) 的轻量级可穿戴系统:事实上,NMES 提供了广泛的不同力量和触觉反馈质量。在这项研究中,我们提出了一个实验设置,通过使用 NMES 在拮抗剂肌肉中产生被加载的触觉感觉,从而丰富虚拟现实体验。我们开发了一个针对特定个体的生物力学模型,该模型可以在提升物体时估计肘部扭矩,以提供合适的电肌肉刺激。我们通过探索基于 NMES 的触觉反馈实施条件(condition)、物理提升物体条件(condition)和无触觉反馈条件(condition)之间的差异,从运动响应、代谢努力和参与者对疲劳的感知方面对我们的系统进行了实验测试。我们的结果表明,无论是在代谢消耗还是用户疲劳感知方面,带有电刺激的条件和具有实际重量的条件都与没有任何负载的条件有显著差异:所实施的反馈能够忠实地再现与物体的交互,表明其在游戏、工作风险评估模拟和教育等不同领域的可能应用。