Physical Intelligence Department, Max Planck Institute for Intelligent Systems, 70569, Stuttgart, Germany.
Department of Information Technology and Electrical Engineering, ETH Zurich, 8092, Zurich, Switzerland.
Nat Commun. 2022 Aug 1;13(1):4465. doi: 10.1038/s41467-022-32059-9.
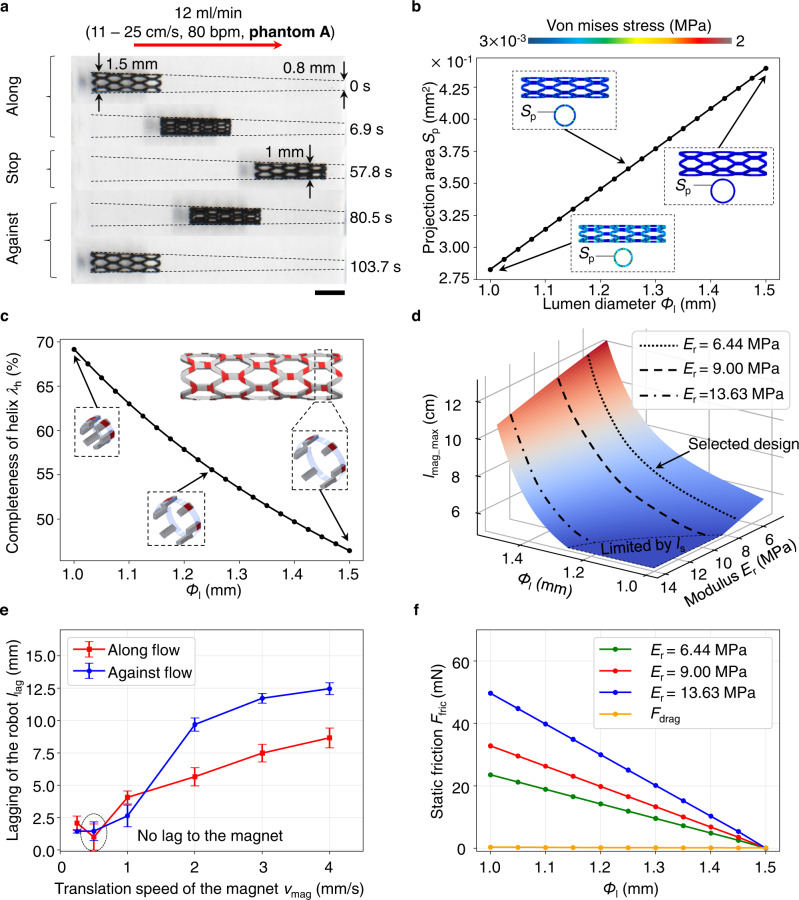
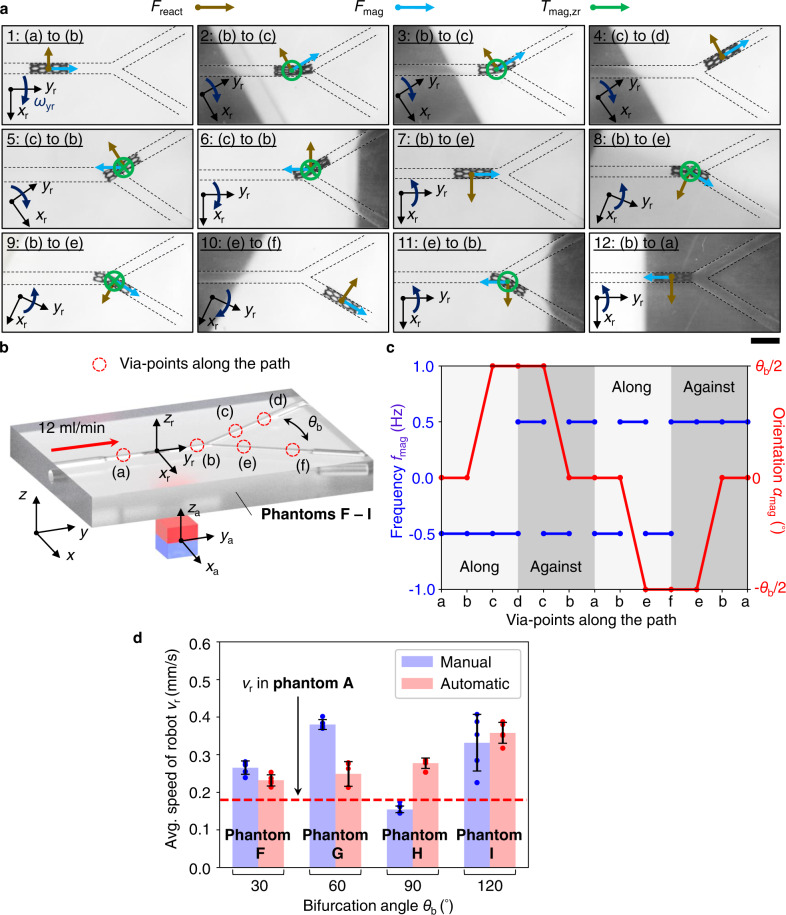
Microcatheters have enabled diverse minimally invasive endovascular operations and notable health benefits compared with open surgeries. However, with tortuous routes far from the arterial puncture site, the distal vascular regions remain challenging for safe catheter access. Therefore, we propose a wireless stent-shaped magnetic soft robot to be deployed, actively navigated, used for medical functions, and retrieved in the example M4 segment of the middle cerebral artery. We investigate shape-adaptively controlled locomotion in phantoms emulating the physiological conditions here, where the lumen diameter shrinks from 1.5 mm to 1 mm, the radius of curvature of the tortuous lumen gets as small as 3 mm, the lumen bifurcation angle goes up to 120, and the pulsatile flow speed reaches up to 26 cm/s. The robot can also withstand the flow when the magnetic actuation is turned off. These locomotion capabilities are confirmed in porcine arteries ex vivo. Furthermore, variants of the robot could release the tissue plasminogen activator on-demand locally for thrombolysis and function as flow diverters, initiating promising therapies towards acute ischemic stroke, aneurysm, arteriovenous malformation, dural arteriovenous fistulas, and brain tumors. These functions should facilitate the robot's usage in new distal endovascular operations.
微导管使各种微创血管内操作成为可能,并与开放性手术相比带来显著的健康益处。然而,由于路径蜿蜒且远离动脉穿刺部位,远端血管区域的安全导管进入仍然具有挑战性。因此,我们提出了一种无线支架状磁性软体机器人,用于在大脑中动脉 M4 段进行部署、主动导航、执行医疗功能以及回收。我们在模拟生理条件的体模中研究了自适应形状控制的运动,其中管腔直径从 1.5 毫米缩小到 1 毫米,蜿蜒管腔的曲率半径小至 3 毫米,管腔分叉角度高达 120 度,脉动血流速度高达 26 厘米/秒。当磁性致动关闭时,机器人也能承受血流。这些运动能力在猪的动脉中得到了证实。此外,机器人的变体可以按需局部释放组织纤溶酶原激活物以进行溶栓,并作为血流导向装置,为急性缺血性中风、动脉瘤、动静脉畸形、硬脑膜动静脉瘘和脑肿瘤等疾病的治疗带来新的契机。这些功能将有助于机器人在新的远端血管内操作中的应用。