Wang Qianqian, Chan Kai Fung, Schweizer Kathrin, Du Xingzhou, Jin Dongdong, Yu Simon Chun Ho, Nelson Bradley J, Zhang Li
Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong (CUHK), Shatin, NT, Hong Kong, China.
Chow Yuk Ho Technology Centre for Innovative Medicine, CUHK, Shatin, NT, Hong Kong, China.
Sci Adv. 2021 Feb 26;7(9). doi: 10.1126/sciadv.abe5914. Print 2021 Feb.
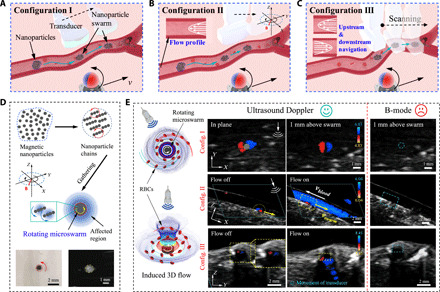
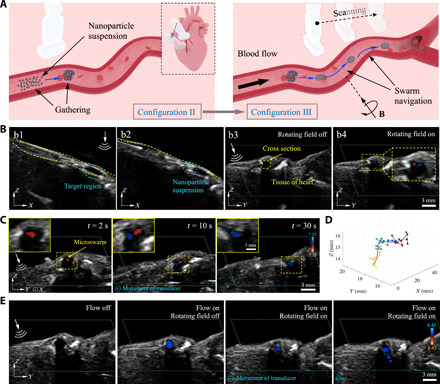
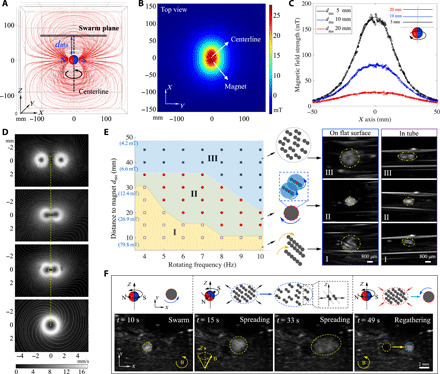
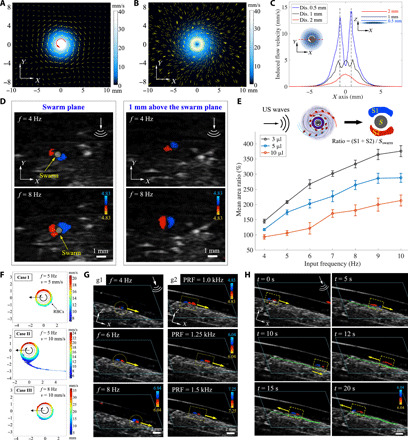
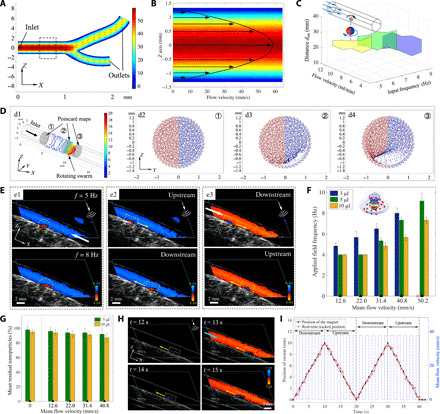
Swarming micro/nanorobots offer great promise in performing targeted delivery inside diverse hard-to-reach environments. However, swarm navigation in dynamic environments challenges delivery capability and real-time swarm localization. Here, we report a strategy to navigate a nanoparticle microswarm in real time under ultrasound Doppler imaging guidance for active endovascular delivery. A magnetic microswarm was formed and navigated near the boundary of vessels, where the reduced drag of blood flow and strong interactions between nanoparticles enable upstream and downstream navigation in flowing blood (mean velocity up to 40.8 mm/s). The microswarm-induced three-dimensional blood flow enables Doppler imaging from multiple viewing configurations and real-time tracking in different environments (i.e., stagnant, flowing blood, and pulsatile flow). We also demonstrate the ultrasound Doppler-guided swarm formation and navigation in the porcine coronary artery ex vivo. Our strategy presents a promising connection between swarm control and real-time imaging of microrobotic swarms for localized delivery in dynamic environments.
群体微型/纳米机器人在各种难以到达的环境中进行靶向递送方面具有巨大潜力。然而,动态环境中的群体导航对递送能力和实时群体定位提出了挑战。在此,我们报告了一种在超声多普勒成像引导下实时导航纳米粒子微群体以进行主动血管内递送的策略。形成了一个磁性微群体并在血管边界附近导航,在那里血流阻力降低以及纳米粒子之间的强相互作用使得能够在流动血液(平均速度高达40.8毫米/秒)中进行上下游导航。微群体引起的三维血流使得能够从多个观察配置进行多普勒成像并在不同环境(即停滞血液、流动血液和搏动血流)中进行实时跟踪。我们还展示了在离体猪冠状动脉中超声多普勒引导的群体形成和导航。我们的策略为群体控制与微型机器人群体的实时成像之间建立了一个有前景的联系,用于动态环境中的局部递送。