Cancrini Adriana, Baitelli Paolo, Lavit Nicora Matteo, Malosio Matteo, Pedrocchi Alessandra, Scano Alessandro
Department of Electronics, Information and Bioengineering, Neuroengineering and Medical Robotics Laboratory, Politecnico di Milano, Milan, Italy.
Department of Neuromotor Physiology, Laboratory of Visuomotor Control and Gravitational Physiology, Fondazione Santa Lucia, IRCCS, Rome, Italy.
PLoS One. 2022 Aug 8;17(8):e0272813. doi: 10.1371/journal.pone.0272813. eCollection 2022.
Robotic rehabilitation is a commonly adopted technique used to restore motor functionality of neurological patients. However, despite promising results were achieved, the effects of human-robot interaction on human motor control and the recovery mechanisms induced with robot assistance can be further investigated even on healthy subjects before translating to clinical practice. In this study, we adopt a standard paradigm for upper-limb rehabilitation (a planar device with assistive control) with linear and challenging curvilinear trajectories to investigate the effect of the assistance in human-robot interaction in healthy people.
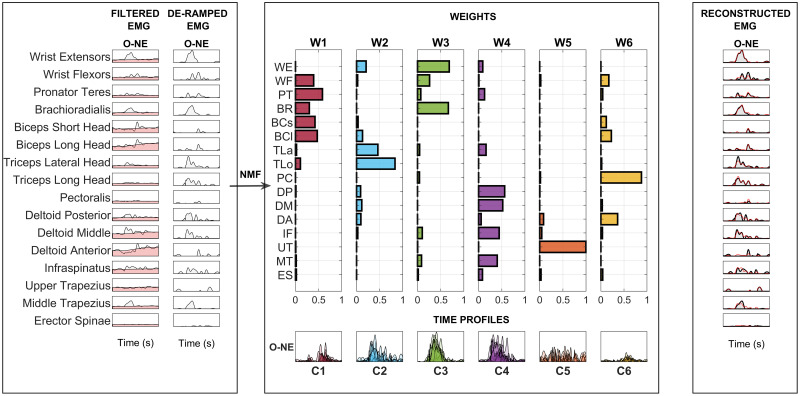
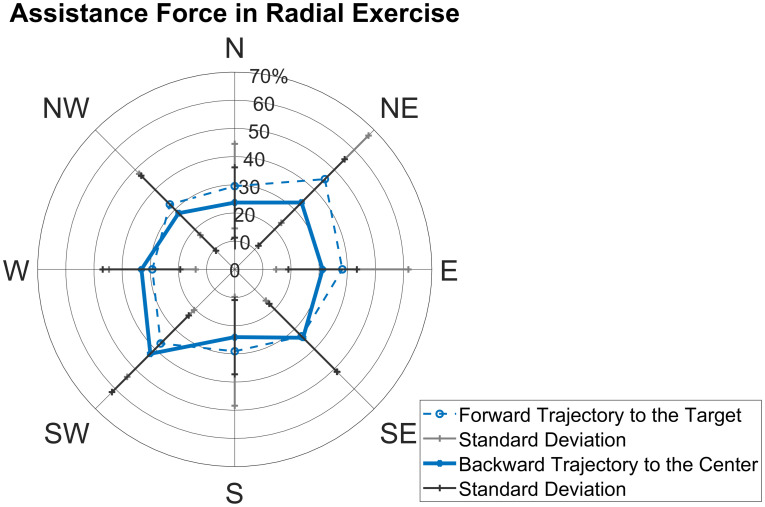
Ten healthy subjects were instructed to perform a large set of radial and curvilinear movements in two interaction modes: 1) free movement (subjects hold the robot handle with no assistance) and 2) assisted movement (with a force tunnel assistance paradigm). Kinematics and EMGs from representative upper-limb muscles were recorded to extract phasic muscle synergies. The free and assisted interaction modes were compared assessing the level of assistance, error, and muscle synergy comparison between the two interaction modes.
It was found that in free movement error magnitude is higher than with assistance, proving that task complexity required assistance also on healthy controls. Moreover, curvilinear tasks require more assistance than standard radial paths and error is higher. Interestingly, while assistance improved task performance, we found only a slight modification of phasic synergies when comparing assisted and free movement.
We found that on healthy people, the effect of assistance was significant on task performance, but limited on muscle synergies. The findings of this study can find applications for assessing human-robot interaction and to design training to maximize motor recovery.
机器人康复是一种常用于恢复神经疾病患者运动功能的技术。然而,尽管已取得了有前景的成果,但在转化为临床实践之前,即使是在健康受试者身上,人机交互对人类运动控制的影响以及机器人辅助诱导的恢复机制仍可进一步研究。在本研究中,我们采用一种用于上肢康复的标准范式(一种具有辅助控制的平面设备),设置线性和具有挑战性的曲线轨迹,以研究人机交互中的辅助对健康人的影响。
指导十名健康受试者在两种交互模式下进行大量的径向和曲线运动:1)自由运动(受试者握住机器人手柄,无辅助)和2)辅助运动(采用力通道辅助范式)。记录代表性上肢肌肉的运动学和肌电图,以提取相位性肌肉协同作用。比较自由和辅助交互模式,评估两种交互模式之间的辅助水平、误差和肌肉协同作用。
研究发现,在自由运动中,误差幅度高于有辅助时,这证明即使是健康对照者,该任务的复杂性也需要辅助。此外,曲线任务比标准径向路径需要更多辅助,且误差更高。有趣的是,虽然辅助提高了任务表现,但在比较辅助运动和自由运动时,我们发现相位性协同作用只有轻微改变。
我们发现,对于健康人来说,辅助对任务表现有显著影响,但对肌肉协同作用的影响有限。本研究结果可用于评估人机交互以及设计训练以最大限度地促进运动恢复。