Department of Electrical and Computer Engineering, Mississippi State University, Starkville, MS 39762, USA.
Sensors (Basel). 2022 Nov 3;22(21):8463. doi: 10.3390/s22218463.
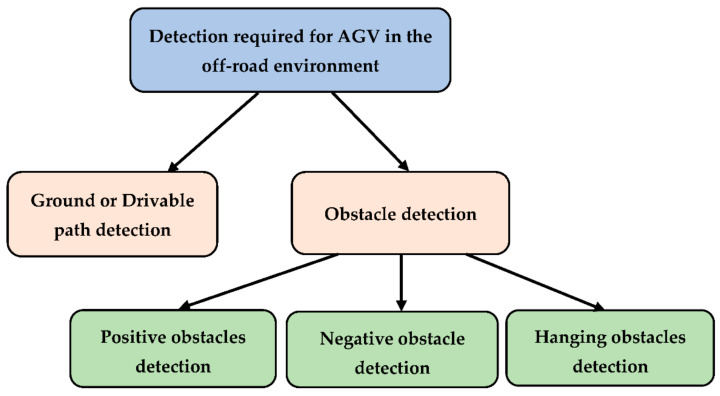
When it comes to some essential abilities of autonomous ground vehicles (AGV), detection is one of them. In order to safely navigate through any known or unknown environment, AGV must be able to detect important elements on the path. Detection is applicable both on-road and off-road, but they are much different in each environment. The key elements of any environment that AGV must identify are the drivable pathway and whether there are any obstacles around it. Many works have been published focusing on different detection components in various ways. In this paper, a survey of the most recent advancements in AGV detection methods that are intended specifically for the off-road environment has been presented. For this, we divided the literature into three major groups: drivable ground and positive and negative obstacles. Each detection portion has been further divided into multiple categories based on the technology used, for example, single sensor-based, multiple sensor-based, and how the data has been analyzed. Furthermore, it has added critical findings in detection technology, challenges associated with detection and off-road environment, and possible future directions. Authors believe this work will help the reader in finding literature who are doing similar works.
当涉及到自主地面车辆 (AGV) 的一些基本能力时,检测是其中之一。为了能够在任何已知或未知的环境中安全导航,AGV 必须能够检测路径上的重要元素。检测既适用于道路上,也适用于非道路上,但在每种环境下都有很大的不同。AGV 必须识别的任何环境的关键要素是可行驶的路径和周围是否有任何障碍物。已经发表了许多专注于以不同方式检测不同组件的工作。在本文中,我们对专为非道路环境设计的 AGV 检测方法的最新进展进行了调查。为此,我们将文献分为三大类:可行驶地面和正、负障碍物。根据使用的技术,每个检测部分进一步分为多个类别,例如基于单个传感器、基于多个传感器以及如何分析数据。此外,还添加了检测技术中的关键发现、与检测和非道路环境相关的挑战以及可能的未来方向。作者相信这项工作将帮助读者找到正在进行类似工作的文献。