Department of Marine Technology, University of Haifa, Haifa, 3498838, Israel.
Department of Marine Biology, Leon H. Charney School of Marine Sciences, University of Haifa, Haifa, Israel.
Sci Rep. 2023 Sep 7;13(1):14769. doi: 10.1038/s41598-023-41655-8.
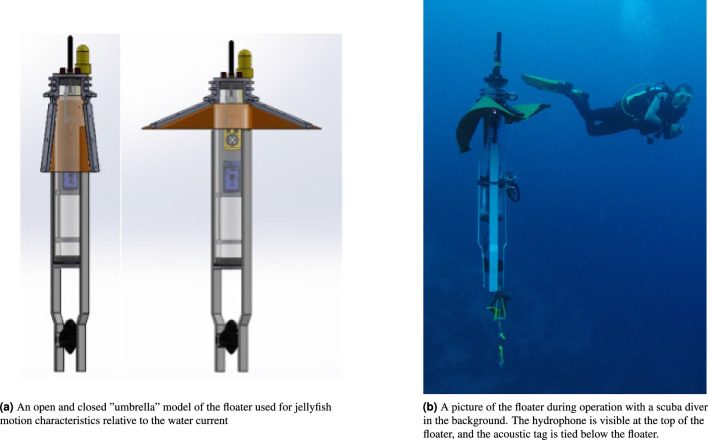
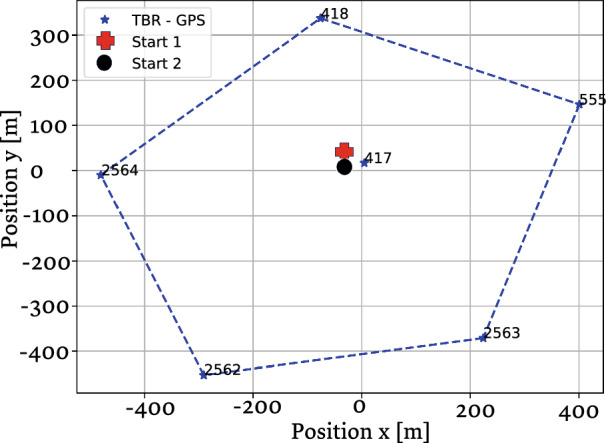
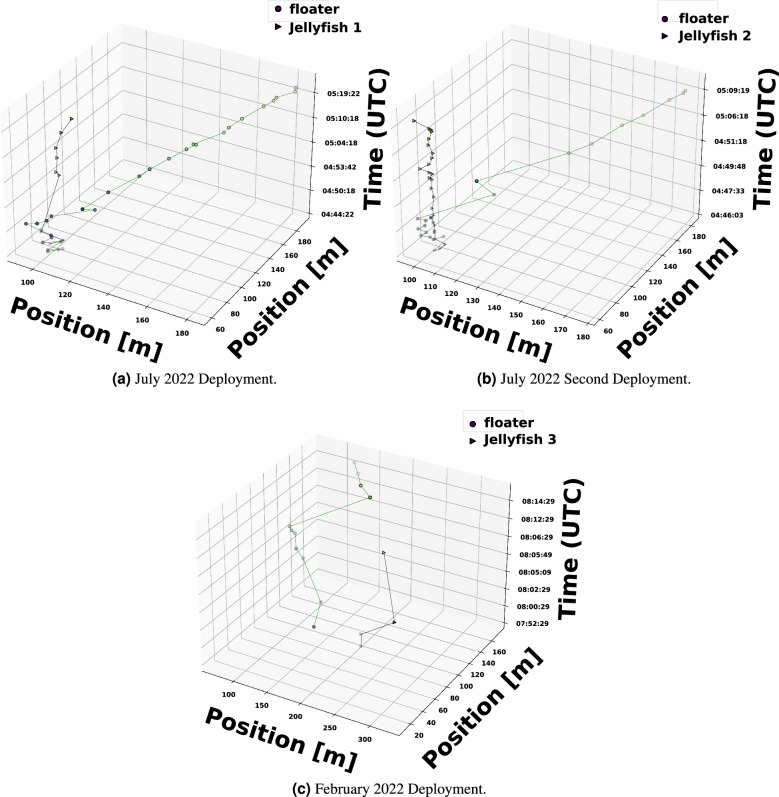
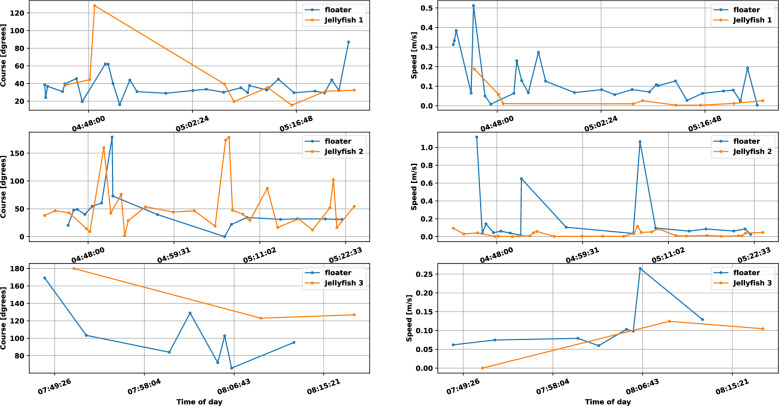
Drifting in large numbers, jellyfish often interfere in the operation of nearshore electrical plants, cause disturbances to marine recreational activity, encroach upon local fish populations, and impact food webs. Understanding the dynamic mechanisms behind jellyfish behavior is of importance in order to create migration models. In this work, we focus on the small-scale dynamics of jellyfish and offer a novel method to accurately track the trajectory of individual jellyfish with respect to the water current. The existing approaches for similar tasks usually involve a surface float tied to the jellyfish for location reference. This operation may induce drag on the jellyfish, thereby affecting its motion. Instead, we propose to attach an acoustic tag to the jellyfish's bell and then track its geographical location using acoustic beacons, which detect the tag's emissions, decode its ID and depth, and calculate the tag's position via time-difference-of-arrival acoustic localization. To observe the jellyfish's motion relative to the water current, we use a submerged floater that is deployed together with the released tagged jellyfish. Being Lagrangian on the horizontal plane while maintaining an on-demand depth, the floater drifts with the water current; thus, its trajectory serves as a reference for the current's velocity field. Using an acoustic modem and a hydrophone mounted to the floater, the operator from the deploying boat remotely changes the depth of the floater on-the-fly, to align it with that of the tagged jellyfish (as reported by the jellyfish's acoustic tag), thereby serving as a reference for the jellyfish's 3D motion with respect to the water current. We performed a proof-of-concept to demonstrate our approach over three jellyfish caught and tagged in Haifa Bay, and three corresponding floaters. The results present different dynamics for the three jellyfish, and show how they can move with, and even against, the water current.
水母大量漂游常常会干扰近岸电厂的运转,扰乱海洋休闲娱乐活动,侵占当地鱼类种群,并影响食物网。了解水母行为背后的动态机制对于创建洄游模型非常重要。在这项工作中,我们专注于水母的小规模动力学,并提供了一种新颖的方法,可以准确地跟踪单个水母相对于水流的轨迹。类似任务的现有方法通常涉及系在水母上的水面浮标作为位置参考。这种操作可能会给水母带来阻力,从而影响其运动。相反,我们建议将声标签附在水母的钟形身体上,然后使用声学信标跟踪其地理位置,声学信标检测标签的发射,解码其 ID 和深度,并通过到达时差声学定位计算标签的位置。为了观察水母相对于水流的运动,我们使用与释放的带标签水母一起部署的水下浮标。浮标在水平面上保持拉格朗日状态,同时按需保持深度,随水流漂移;因此,其轨迹作为水流速度场的参考。操作人员使用安装在浮标上的声学调制解调器和声纳,远程调整浮标深度,使其与带标签的水母对齐(如水母的声学标签所报告的),从而作为水母相对于水流的 3D 运动的参考。我们进行了一个概念验证,以展示我们在海法湾捕获和标记的三只水母和三只相应浮标上的方法。结果呈现了三只水母的不同动力学,并展示了它们如何与水流一起甚至逆着水流移动。