Van Calck Ludéric, Pacheco Alexandre, Strobel Volker, Dorigo Marco, Reina Andreagiovanni
Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle (IRIDIA), Université Libre de Bruxelles, Brussels, Belgium.
Sci Rep. 2023 Nov 21;13(1):20417. doi: 10.1038/s41598-023-46238-1.
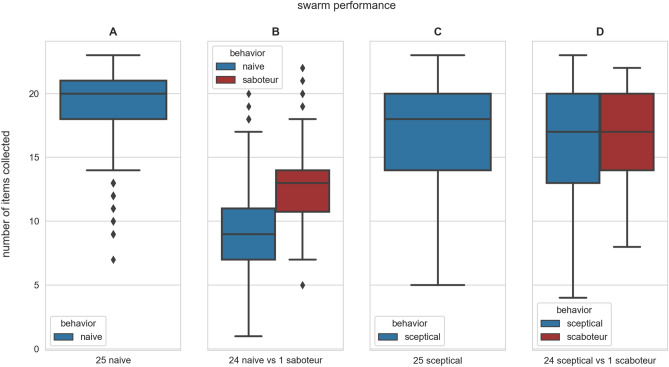
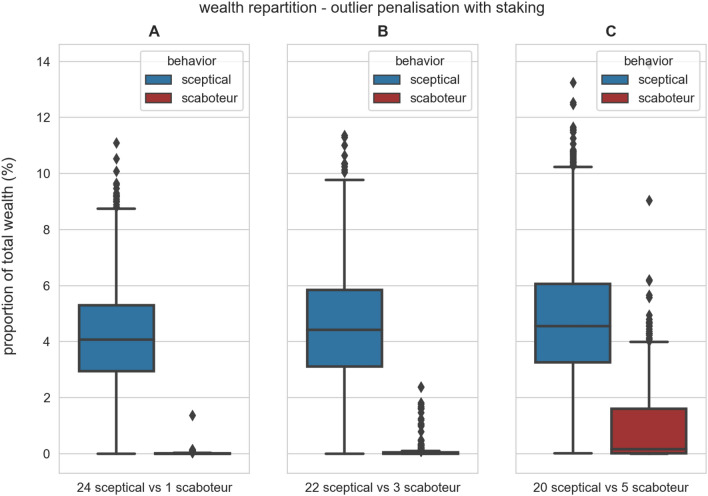
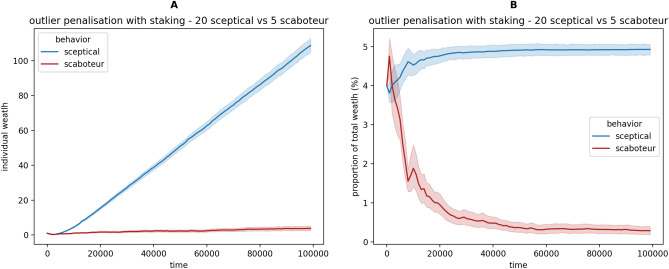
Robot swarms are generally considered to be composed of cooperative agents that, despite their limited individual capabilities, can perform difficult tasks by working together. However, in open swarms, where different robots can be added to the swarm by different parties with potentially competing interests, cooperation is but one of many strategies. We envision an information market where robots can buy and sell information through transactions stored on a distributed blockchain, and where cooperation is encouraged by the economy itself. As a proof of concept, we study a classical foraging task, where exchanging information with other robots is paramount to accomplish the task efficiently. We illustrate that even a single robot that lies to others-a so-called Byzantine robot-can heavily disrupt the swarm. Hence, we devise two protection mechanisms. Through an individual-level protection mechanism, robots are more sceptical about others' information and can detect and discard Byzantine information, at the cost of lower efficiency. Through a systemic protection mechanism based on economic rules regulating robot interactions, robots that sell honest information acquire over time more wealth than Byzantines selling false information. Our simulations show that a well-designed robot economy penalises misinformation spreading and protects the swarm from Byzantine behaviour. We believe economics-inspired swarm robotics is a promising research direction that exploits the timely opportunity for decentralised economies offered by blockchain technology.
机器人集群通常被认为是由协作智能体组成的,尽管它们个体能力有限,但通过协同工作能够执行困难的任务。然而,在开放集群中,不同的机器人可能由具有潜在竞争利益的不同方添加到集群中,合作只是众多策略之一。我们设想了一个信息市场,机器人可以通过存储在分布式区块链上的交易来买卖信息,并且经济本身会鼓励合作。作为概念验证,我们研究了一个经典的觅食任务,在这个任务中,与其他机器人交换信息对于高效完成任务至关重要。我们表明,即使是一个向其他机器人说谎的单个机器人——即所谓的拜占庭机器人——也会严重扰乱集群。因此,我们设计了两种保护机制。通过个体层面的保护机制,机器人对其他机器人的信息更加怀疑,能够检测并丢弃拜占庭信息,代价是效率降低。通过基于调节机器人交互的经济规则的系统保护机制,随着时间的推移,出售诚实信息的机器人比出售虚假信息的拜占庭机器人获得更多财富。我们的模拟表明,精心设计的机器人经济会惩罚错误信息的传播,并保护集群免受拜占庭行为的影响。我们相信,受经济学启发的群体机器人技术是一个有前途的研究方向,它利用了区块链技术为去中心化经济提供的适时机遇。