Sainsbury Wellcome Centre, University College London, London, United Kingdom.
Department of Cell and Developmental Biology, University College London, London, United Kingdom.
Elife. 2024 Feb 9;13:e85274. doi: 10.7554/eLife.85274.
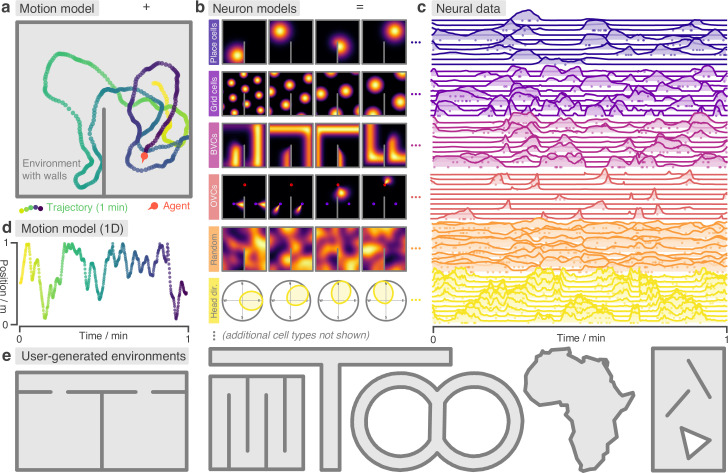
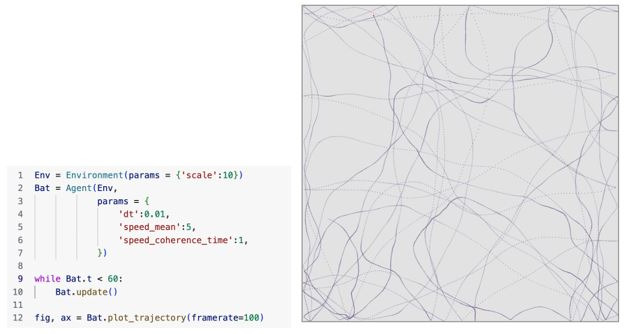
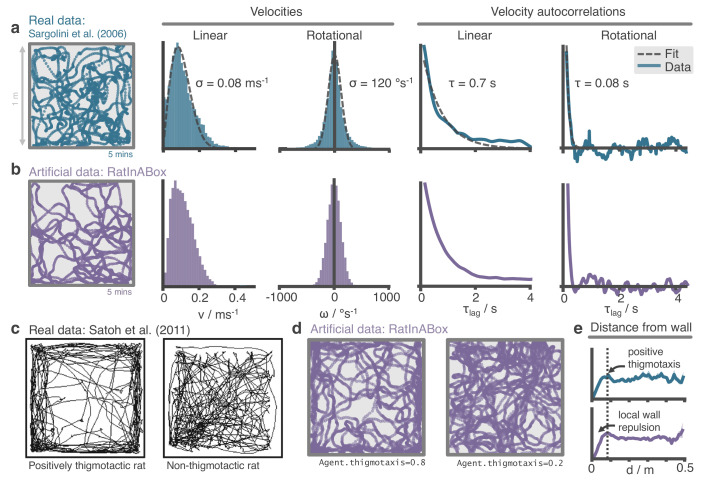
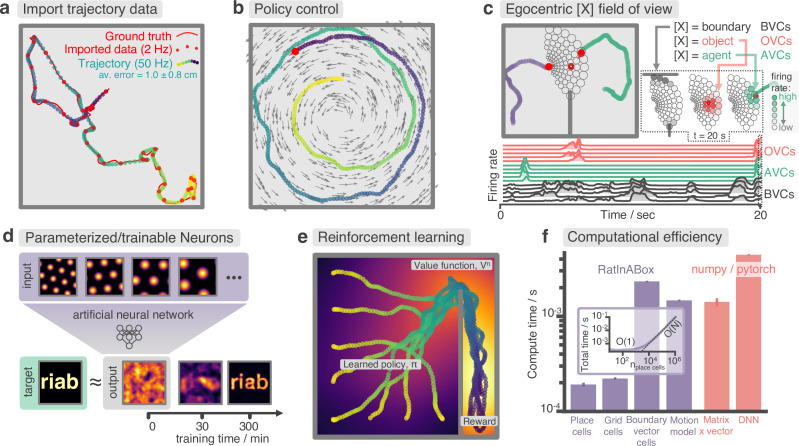
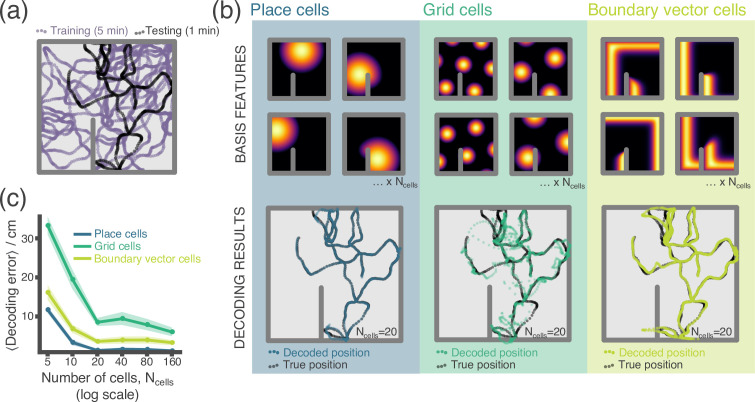
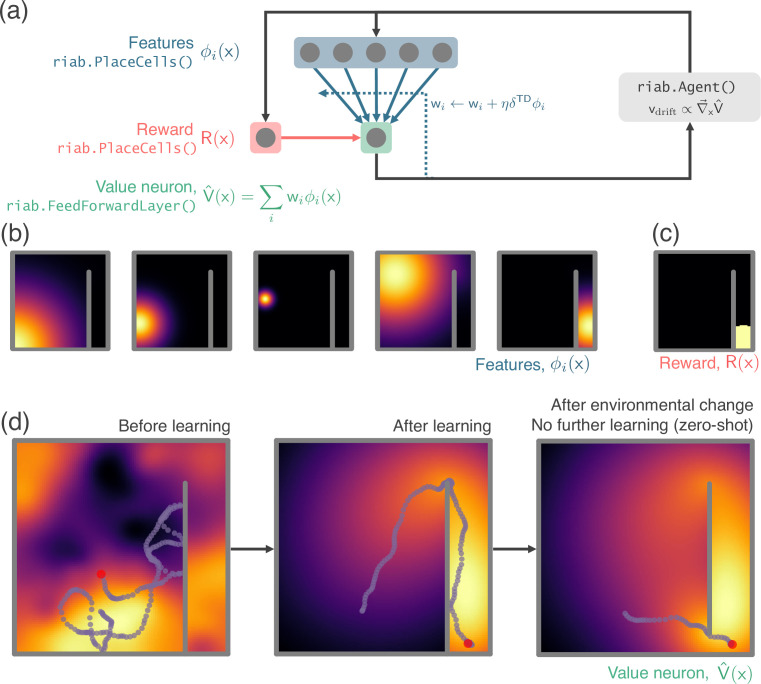
Generating synthetic locomotory and neural data is a useful yet cumbersome step commonly required to study theoretical models of the brain's role in spatial navigation. This process can be time consuming and, without a common framework, makes it difficult to reproduce or compare studies which each generate test data in different ways. In response, we present RatInABox, an open-source Python toolkit designed to model realistic rodent locomotion and generate synthetic neural data from spatially modulated cell types. This software provides users with (i) the ability to construct one- or two-dimensional environments with configurable barriers and visual cues, (ii) a physically realistic random motion model fitted to experimental data, (iii) rapid online calculation of neural data for many of the known self-location or velocity selective cell types in the hippocampal formation (including place cells, grid cells, boundary vector cells, head direction cells) and (iv) a framework for constructing custom cell types, multi-layer network models and data- or policy-controlled motion trajectories. The motion and neural models are spatially and temporally continuous as well as topographically sensitive to boundary conditions and walls. We demonstrate that out-of-the-box parameter settings replicate many aspects of rodent foraging behaviour such as velocity statistics and the tendency of rodents to over-explore walls. Numerous tutorial scripts are provided, including examples where RatInABox is used for decoding position from neural data or to solve a navigational reinforcement learning task. We hope this tool will significantly streamline computational research into the brain's role in navigation.
生成合成运动和神经数据是研究大脑在空间导航中作用的理论模型的常用且繁琐的步骤。这个过程很耗时,而且没有通用的框架,使得很难复制或比较以不同方式生成测试数据的研究。针对这个问题,我们提出了 RatInABox,这是一个开源的 Python 工具包,用于对现实啮齿动物的运动进行建模,并从空间调制的细胞类型生成合成神经数据。该软件为用户提供了以下功能:(i)构建具有可配置障碍物和视觉线索的一维或二维环境的能力;(ii)符合实验数据的物理上逼真的随机运动模型;(iii)快速在线计算海马结构中许多已知的自我位置或速度选择细胞类型(包括位置细胞、网格细胞、边界向量细胞、头部方向细胞)的神经数据;(iv)构建自定义细胞类型、多层网络模型以及数据或策略控制运动轨迹的框架。运动和神经模型在空间和时间上是连续的,并且对边界条件和墙壁具有地形敏感性。我们证明,开箱即用的参数设置复制了啮齿动物觅食行为的许多方面,例如速度统计和啮齿动物过度探索墙壁的趋势。提供了许多教程脚本,包括使用 RatInABox 从神经数据解码位置或解决导航强化学习任务的示例。我们希望这个工具将大大简化大脑在导航中的作用的计算研究。