He Zhilong, Duan Hongxiao, Zeng Jianmin, Zhou Jie, Zhong Xiaolong, Wu Zhixin, Ni Shenzhou, Jiang Ze, Xie Guangjun, Lee Jung-Yong, Lu Yi, Zeng Yonghong, Zhang Biao, Ying Wu Bin, Yang Zhibin, Zhang Zhang, Liu Gang
Department of Micro/Nano Electronics, School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China.
School of Microelectronics, Hefei University of Technology, Hefei 230601, China.
Sci Adv. 2025 Jan 3;11(1):eads2834. doi: 10.1126/sciadv.ads2834.
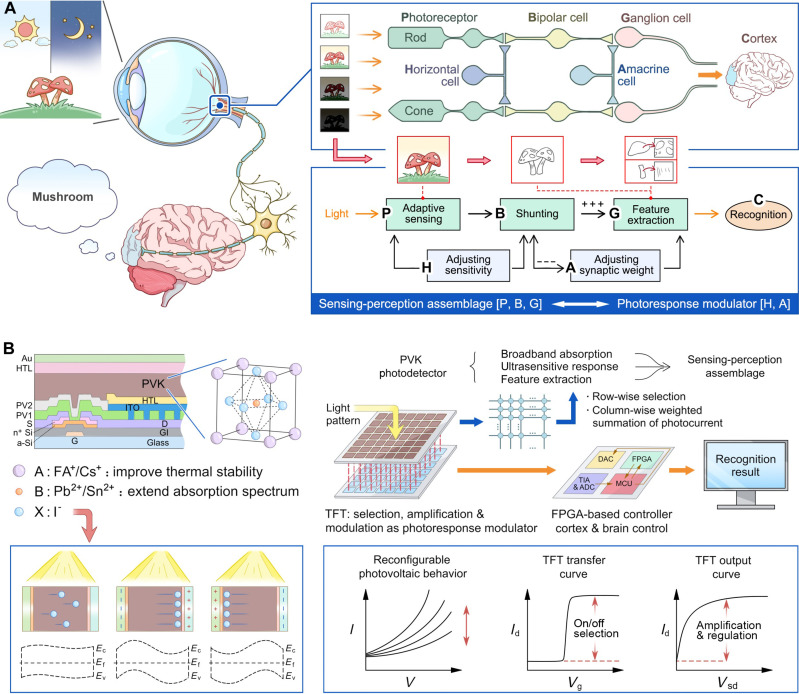
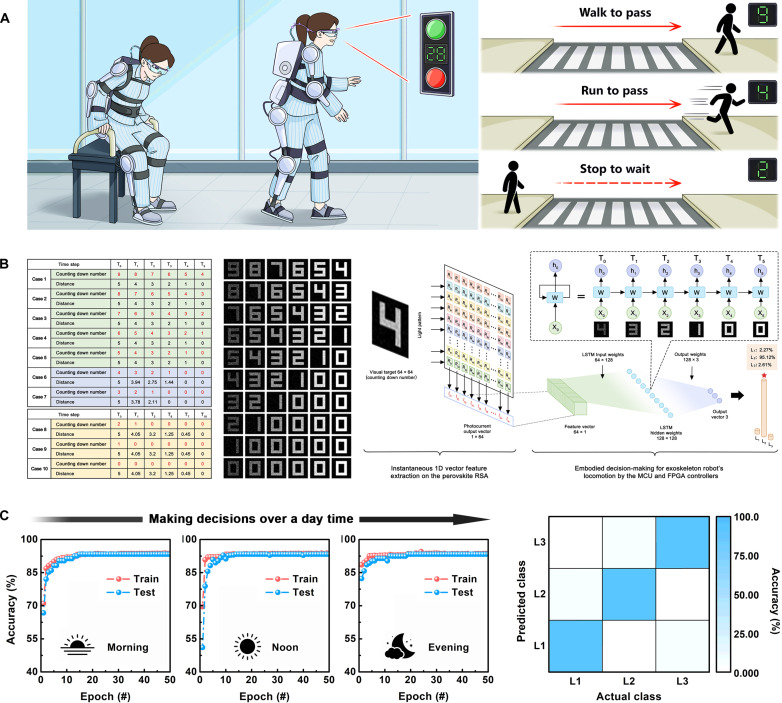
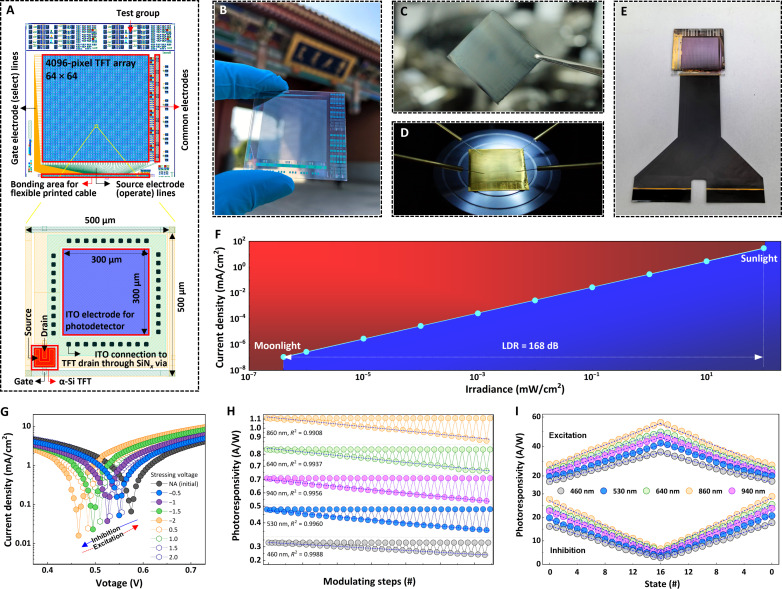
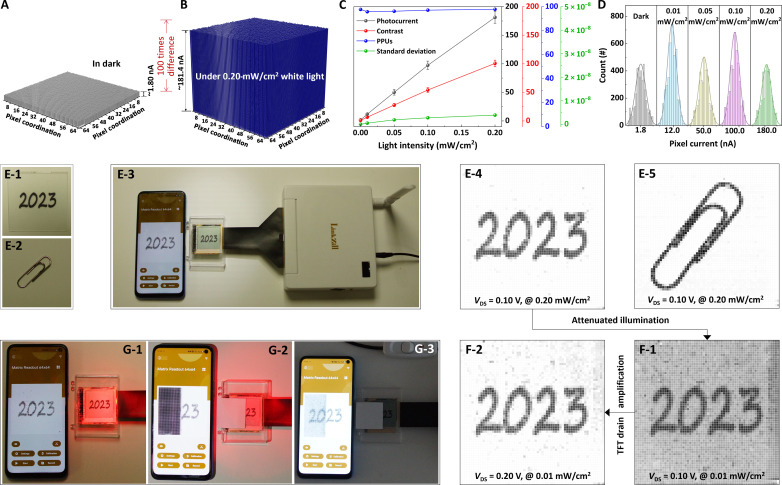
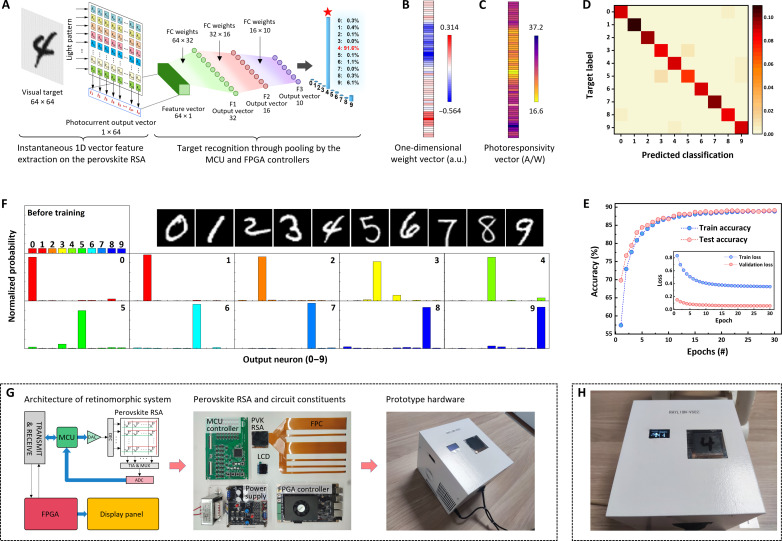
Retinomorphic systems that can see, recognize, and respond to real-time environmental information will extend the complexity and range of tasks that an exoskeleton robot can perform to better assist physically disabled people. However, the lack of ultrasensitive, reconfigurable, and large-scale integratable retinomorphic devices and advanced edge-processing algorithms makes it difficult to realize retinomorphic hardware. Here, we report the retinomorphic hardware prototype with a 4096-pixel perovskite image sensor array as core module to endow embodied intelligent vision functionalities. The retinomorphic sensor array, using a one photodetector-one transistor geometry to resemble retinal circuit with broadband, ultrahigh, and reconfigurable photoresponsivities, executes both adaptive imaging with a contrast enhancement of ~620% under a dim-lit intensity of 10 microwatts per square centimeter and an instantaneous one-dimensional feature extraction algorithm to decompose the origin visual scenarios into parsimoniously encoded spatiotemporal information. This retinomorphic system endows embodied intelligence with adaptive imaging, in situ processing, and decision-making capabilities and promises enormous potential for autonomous robot applications.
能够看到、识别并响应实时环境信息的视网膜形态系统将扩展外骨骼机器人可以执行的任务的复杂性和范围,从而更好地帮助身体残疾的人。然而,缺乏超灵敏、可重构且可大规模集成的视网膜形态设备以及先进的边缘处理算法使得难以实现视网膜形态硬件。在此,我们报告了一种以4096像素钙钛矿图像传感器阵列作为核心模块的视网膜形态硬件原型,以赋予具身智能视觉功能。该视网膜形态传感器阵列采用一个光电探测器-一个晶体管的几何结构,类似于具有宽带、超高和可重构光响应性的视网膜电路,在每平方厘米10微瓦的昏暗光照强度下执行对比度增强约620%的自适应成像,并执行瞬时一维特征提取算法,将原始视觉场景分解为简洁编码的时空信息。这种视网膜形态系统赋予具身智能自适应成像、原位处理和决策能力,并有望在自主机器人应用中具有巨大潜力。