Xiao Jerry, Chihara Ray, Gray Katherine D, Chan Edward Y, Kim Min P
Division of Thoracic Surgery, Department of Surgery, Houston Methodist Hospital, Houston, Texas.
Department of Surgery and Cardiothoracic Surgery, Weill Cornell Medical College, Houston Methodist Hospital, Houston, Texas.
Ann Thorac Surg Short Rep. 2022 Dec 21;1(2):249-252. doi: 10.1016/j.atssr.2022.12.006. eCollection 2023 Jun.
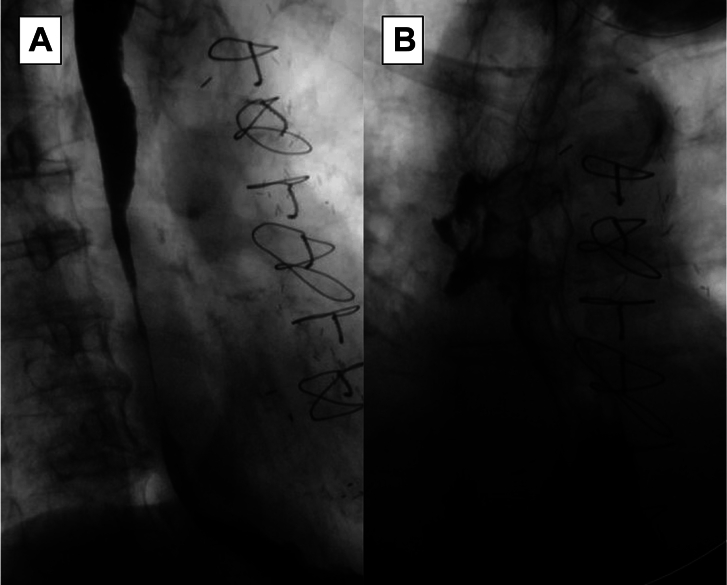
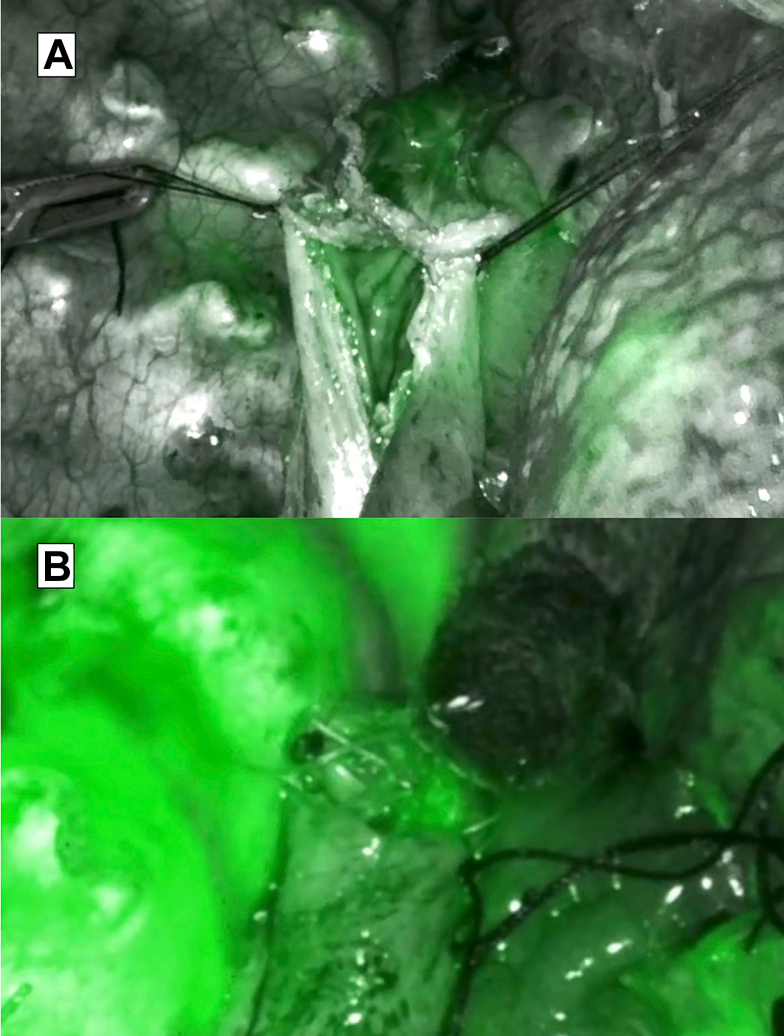
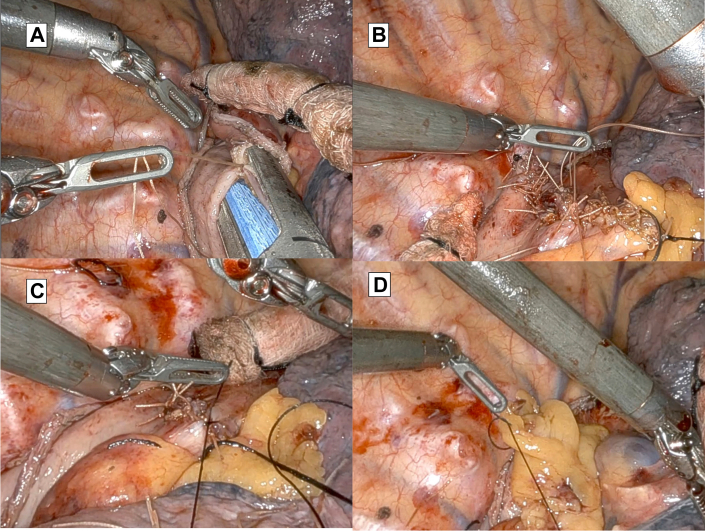
There are several options for intrathoracic esophagogastric anastomosis during Ivor Lewis esophagectomy. These include end-to-end stapled anastomosis, handsewn anastomosis, and stapled anastomosis. We present the case of an 84-year-old man with benign esophageal stricture who underwent robot-assisted laparoscopic and thoracoscopic Ivor Lewis esophagectomy with a total portal robotic linear stapled anastomosis that allowed intrathoracic esophagogastric anastomosis creation entirely using the robotic platform. This technique alleviates the need for a skilled bedside assistant and further demonstrates the convenience, maneuverability, and dexterity of the robotic platform.
在艾弗·刘易斯食管切除术中,胸腔内食管胃吻合有多种选择。这些包括端端吻合器吻合、手工缝合吻合和吻合器吻合。我们报告一例84岁患有良性食管狭窄的男性患者,他接受了机器人辅助腹腔镜和胸腔镜下的艾弗·刘易斯食管切除术,并采用了全门静脉机器人线性吻合器吻合,该方法使得胸腔内食管胃吻合完全在机器人平台上完成。这项技术减少了对熟练床边助手的需求,并进一步展示了机器人平台的便利性、可操作性和灵活性。